{kind=link}
Spring 2016 Pathfinder: Design and Manufacturing – Chassis Selection Through the Iterative Design Loop
{kind=link}
By:
Lindsay Levanas (Design and Manufacturing)
Table of Contents
Introduction
Although all previous posts regarding Spring 2016 Pathfinder’s chassis have focused on the rocker bogie suspension system design, the use of a Wild Thumper chassis was also considered and so it is worth documenting the iterative design loop that lead to the final product. This report will outline the decisions that had to be made and their impact on the design.
Initial Requirements – Rocker Bogie Suspension System
To start with, Spring 2016 Pathfinder’s level 1 terrain requirement is to traverse the CSULB campus at night.1 To this end, the rocker bogie suspension system was chosen and implemented as a level 2 requirement2 and a basic rocker bogie suspension system was modeled as an example.3
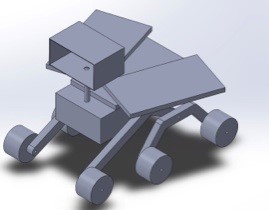
Figure 1. Basic Model of rocker bogie system
The idea modeled, the next step was to research into physical implementation.
Initial Research – Rocker Bogie Suspension System
As rocker bogie suspension systems require particular dimensions to function properly, it was decided that purchasing a working model would be best. Therefore, rocker bogie chassis were researched and only one was found to be purchasable: the Bogie Runt Rover from ServoCity.4

Figure 2. Bogie Runt Rover
Trade-off Study – Wild Thumper vs. Bogie Runt Rover
Having found a rocker bogie suspension system, the next step was to conduct a trade-off study between that and a Wild Thumper chassis. Note that Spring 2016’s Pathfinder is meant to improve upon the design that came before it and that this is where the Wild Thumper chassis is coming from.5 Below illustrated the initial trade-off study between the two chassis.4,8,9,10
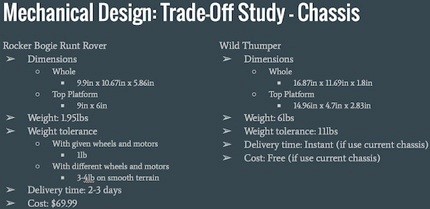
Figure 3. Chassis Trade-Off Study
Results – Wild Thumper
After listing the different aspects of the two chassis systems, the important factors need to be clarified. To start with, the width of the tilt system (at least 10.48in)6 is dictated by the use of a Google Tango Tablet, and so needs to be considered. Also, the weight of the load that Spring 2016’s Pathfinder will carry is at least 2.45lbs from the tilt system alone as shown below.
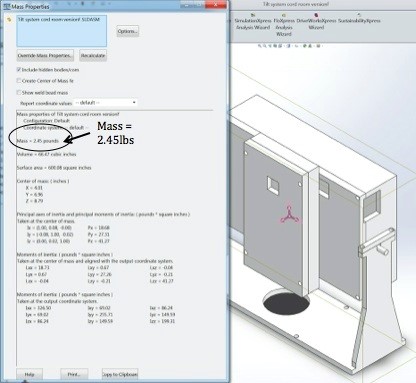
Figure 4. Tilt System Mass Properties
On top of all this, the chassis needs to be able to hold the pan system, electronics, electronic protection box, batteries and solar panels. Although at this point in the design process these additional parts had yet to be finalized, the concern of going over the weigh capacity (and surface area) of the Runt Rover was still relevant and so was taken into consideration when choosing a chassis. Also considered was the terrain the chassis could handle under load.
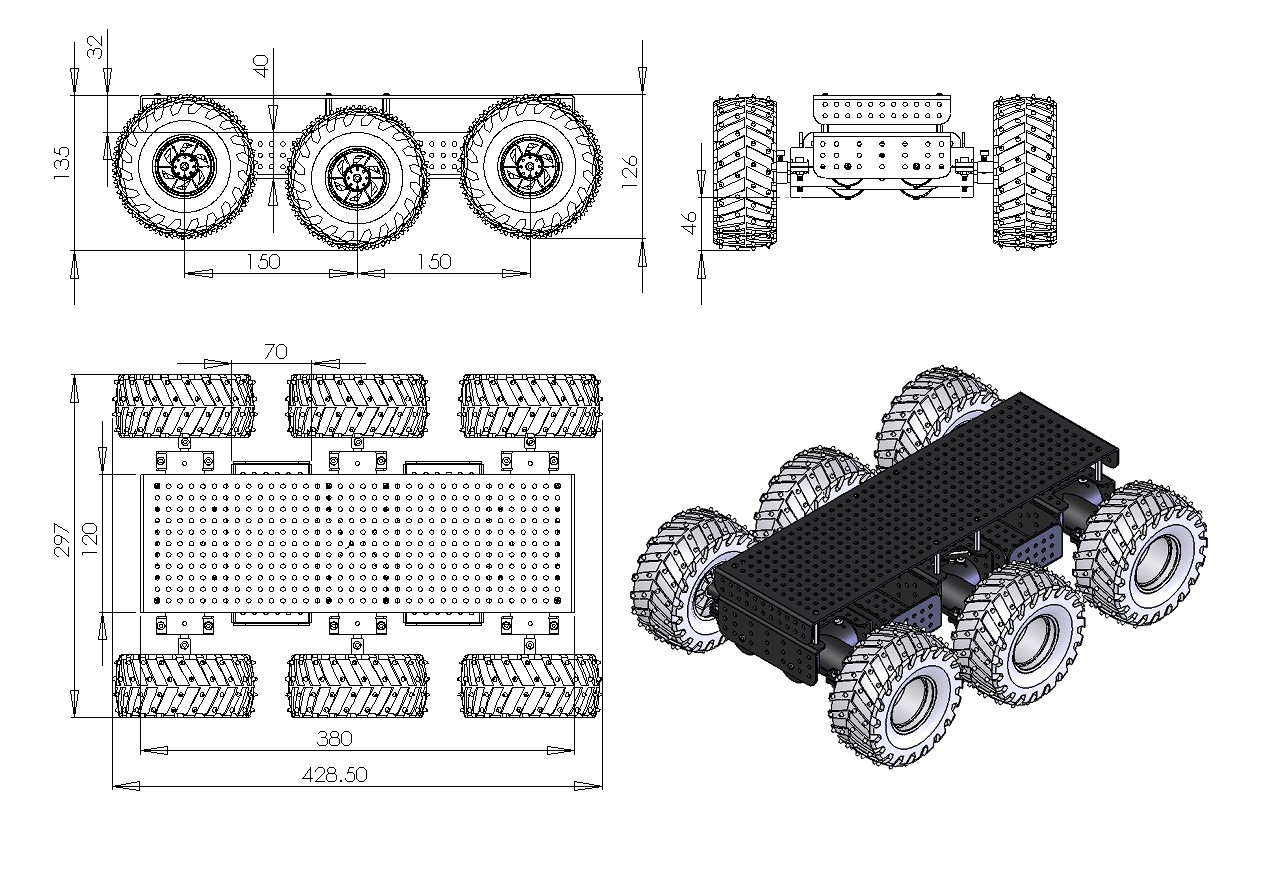
Given that the Runt Rover base was smaller then the tilt system width, and that it could only carry up to 4lbs on smooth terrain, the Wild Thumper was chosen to be Pathfinder’s chassis at this time.

Figure 5. Wild Thumper Chassis
New Resource Option – Rocker Bogie Suspension System
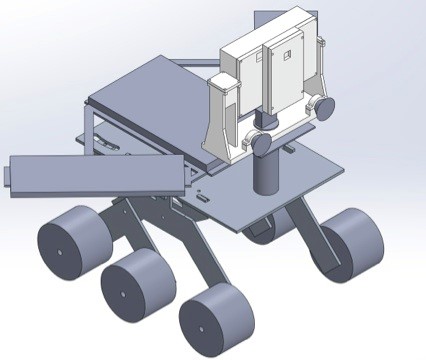
Not long after the Wild Thumper was chosen as the chassis, a new resource was made available to Spring 2016’s Pathfinder team. This resource was aluminum cutting and milling. This meant that the Runt Rover previously viewed as too small could be modeled in Solidworks, simplified, doubled in size, and cut out of aluminum. To see how this would compare to the Wild Thumper, the proposed rocker bogie system was modeled in Solidworks so that size and weight could be properly estimated.7
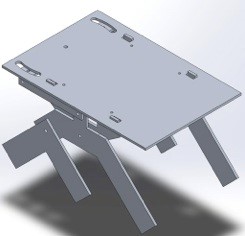
Figure 6. Rocker Bogie System
Trade-off Study – Wild Thumper vs. Rocker Bogie Suspension System
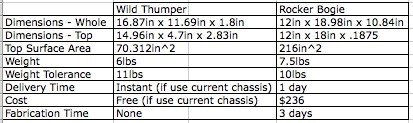
The above picture compares the specs of both chassis
Conclusion and Future Plans
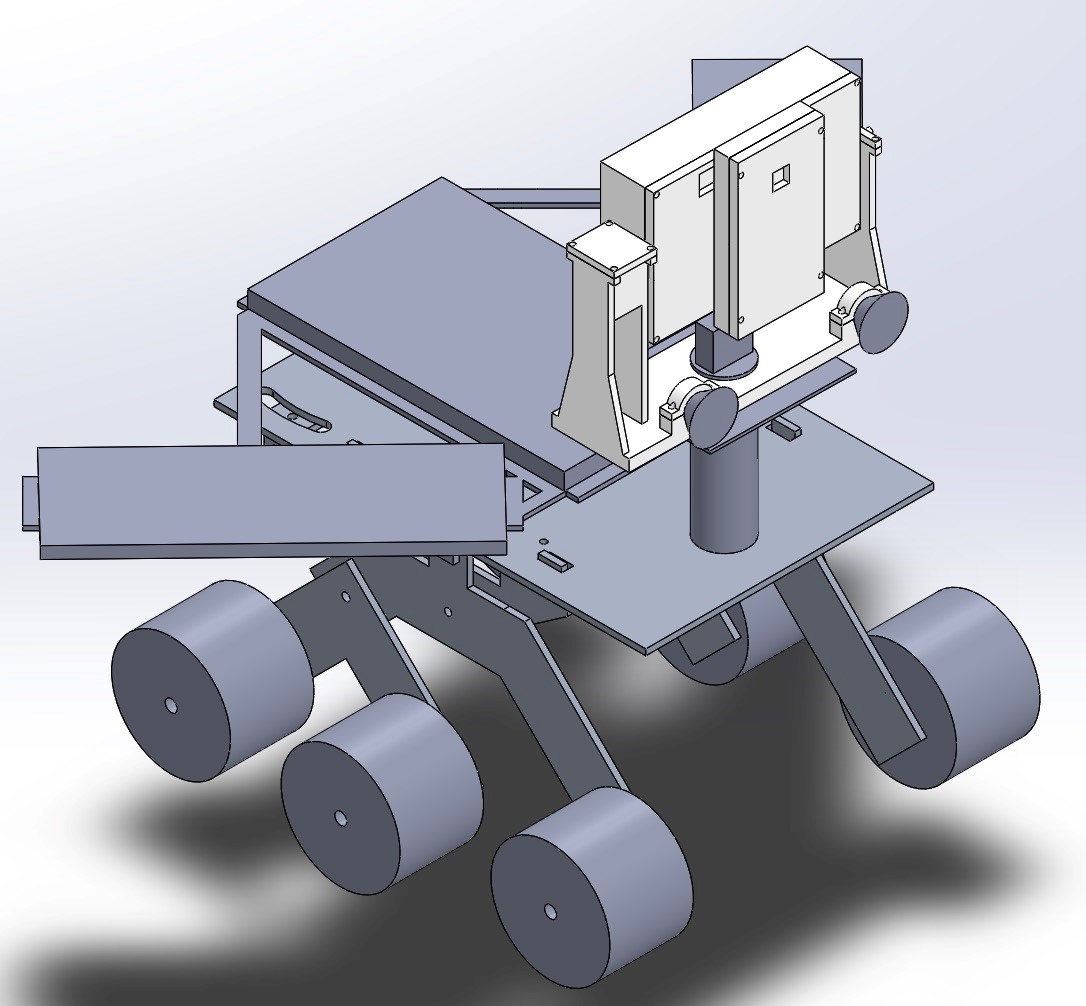
As the Rocker Bogie design allowed for 145.688 more square inches of top surface area and 9.04 more inches of obstacle avoidance clearance for a loss of only 1lb of weight tolerance and 1.5lbs of unloaded weight, the Rocker Bogie design was chosen as Spring 2016’s final Pathfinder chassis. A sample model of the chassis with its future load is shown below.
Source Materials:
- Spring 2016 Pathfinder Preliminary Design Documentation, Level 1 Requirement, 2/19/16 http://arxterra.com/spring-2016-pathfinder-preliminary-design-documentation/
- Spring 2016 Pathfinder Preliminary Design Documentation, System Requirements (Level 2 Requirements), 2/19/16 http://arxterra.com/spring-2016-pathfinder-preliminary-design-documentation/
- Spring 2016 Pathfinder Preliminary Design Documentation, Mechanical Design, 2/19/16 http://arxterra.com/spring-2016-pathfinder-preliminary-design-documentation/
- Bogie Runt Rover https://www.servocity.com/html/bogie_runt_rovertm__637162_.html#.VvmvlJGprwI
- Pathfinder Final Documentation, Pathfinder Preferred Design, 12/12/2014 http://arxterra.com/pathfinder-final-documentation/
- Spring 2016 Pathfinder Design and Manufacturing – Tilt System Design, Tilt Base, 3/9/2016 http://arxterra.com/pathfinder-design-and-manufacturing-tilt-system-design/
- Spring 2016 Pathfinder Design and Manufacturing – Rocker Bogie Suspension System Design, 3/30/2016 http://arxterra.com/2016-pathfinder-design-and-manufacturing-rocker-bogie-suspension-system-design/
- 6WD dimension http://cdn.sparkfun.com/datasheets/Robotics/6WD%20dimension.jpg
- Pololu – Dagu Wild Thumper 6WD All-Terrain Chassis, Black, 75:1, Specifications, https://www.pololu.com/product/1563
- Robotshop.com/media/files/pdf/schematics, http://www.robotshop.com/media/files/pdf/schematics-637162.pdf
{kind=link}