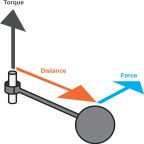
https://www.arxterra.com/wp-content/uploads/2019/05/FeatSquare-e1557787284508.jpg144144Jeremy Anderson/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJeremy Anderson2019-05-17 20:20:422019-05-21 13:19:57E-Racer Spring 2019 Magnetic Force
https://www.arxterra.com/wp-content/uploads/2019/05/60352357_1025107474544026_5255316039150862336_n.jpg144144Jennie Lim/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJennie Lim2019-05-05 18:07:322019-05-22 15:05:51E-Racer Spring 2019 Final Blog
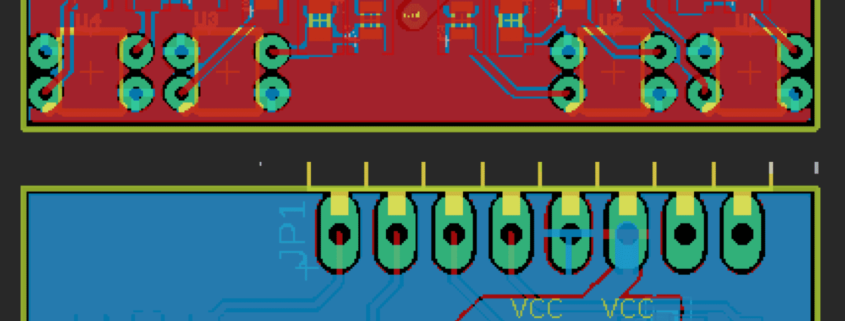
https://www.arxterra.com/wp-content/uploads/2019/05/6-1.jpg144144Lundao Gao/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngLundao Gao2019-05-03 14:39:342019-05-21 12:57:19Line Following using a QRE1113 IR Sensor
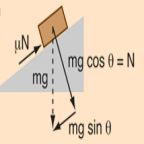
https://www.arxterra.com/wp-content/uploads/2019/04/Cfirction.jpg144144Jennie Lim/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJennie Lim2019-04-23 13:44:092019-05-21 12:44:17E-Racer Spring 2019 Coefficient of Friction
https://www.arxterra.com/wp-content/uploads/2018/12/Goliath-Featured-Image.png128128Felix Velasquez/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngFelix Velasquez2018-12-23 14:37:472018-12-23 15:10:53Goliath Fall 2018 Final Blog Post
https://www.arxterra.com/wp-content/uploads/2018/04/Untitled-16.png440440Felix Velasquez/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngFelix Velasquez2018-10-09 15:25:212018-12-22 14:32:42Goliath Fall ’18 Motor Testing