Research Projects
Advanced research topics covered by students spanning every field in Electrical Engineering. With highlights in Robotics, Sensors, Programming, and Electronics.
C/C++ ARDUINO ROBOTS
Bluetooth Antenna Design
Matt Shellhammer | October 16th, 2017
Overview
A look at different antenna designs and how designs affect signal strength. With included comparisons across different antennas in physical usage space and general use cases. Preformed a Bluetooth Loss of Signal (LOS) Experiment in finding deadlines around a particular Bluetooth transmitter.
[expand title=”References” tag=”h4″]
- www.ti.com/lit/an/snoa519b/snoa519b.pdf
- http://www.antenna-theory.com/antennas/main.php
- https://en.wikipedia.org/wiki/Dielectric_resonator_antenna
- https://www.researchgate.net/figure/237054209_fig1_Figure-1-A-rectangular-Dielectric-resonator-antenna-geometry
- https://www.digikey.jp/Web%20Export/Supplier%20Content/Pulse_553/PDF/pulse_ceramic-chip-antennas-vs-pcb-trace-antennas.pdf
[/expand]
Bluetooth Antenna Design Part II
Matt Shellhammer | December 11th, 2017
Overview
An overview of different antenna types and how the size effects bandwidth and frequency. With a closer look at ceramic on-chip designed antennas. Includes a second Bluetooth Los of Signal (LOS) Experiment mapping Bluetooth signal strength on the 3Dot in 3D space.
[expand title=”References” tag=”h4″]
- www.ti.com/lit/an/snoa519b/snoa519b.pdf
- http://www.antenna-theory.com/antennas/main.php
- https://en.wikipedia.org/wiki/Dipole_antenna
- https://en.wikipedia.org/wiki/Dielectric_resonator_antenna
- https://en.wikipedia.org/wiki/Permittivity
- https://en.wikipedia.org/wiki/Relative_permittivity
[/expand]
Buck/Boost Converter Model with Motor Load
Tai Nguyen, Miki Kelley | December 10th, 2017
Overview
A study of Buck and boost converters powering electrically modeled DC motors. Focus on calculating back-emf from observable measurements from a buck/boost converter driving a motor model.
[expand title=”References” tag=”h4″]
- https://www.mathworks.com/products/matlab.html
- https://www.mathworks.com/help/physmod/elec/ref/dcmotor.html
- https://circuitglobe.com/what-is-a-dc-motor.html
[/expand]
Data Backup with EEEPROM
Ricardo Alcaraz | October 24th, 2017
 Loading...
Loading...
Overview
A description of EEPROM in the Atemega32u4 its usage and lifespan. Includes a detailed guide on how to write and read data from the EEPROM in C++. Then covers a case of detecting a brown-out condition and setting up recoverable data. Provides a link to GitHub files with detailed explanation.
LIDAR
James Donahue | November 11th, 2017
Overview
A look at what LIDAR is and how it works. Then a classical comparison of the different type of LIDAR sensors and their use cases. Then an introductory look at interfacing with Arduino to extract distance data points for 3D scans.
[expand title=”References” tag=”h4″]
- https://en.wikipedia.org/wiki/Lidar
- http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf
- https://www.fs.fed.us/pnw/pubs/pnw_gtr768.pdf
- http://felix.rohrba.ch/en/2015/lidar-footprint-diameter/
- https://buy.garmin.com/en-US/US/p/557294#specs
- https://acroname.com/sites/default/files/assets/sharp_gp2y0a710yk0f_datasheet.pdf
- https://www.parallax.com/sites/default/files/downloads/28015-PING-Sensor-Product-Guide-v2.0.pdf
- http://www.lidar-uk.com/how-lidar-works/
- http://www.hamamatsu.com/us/en/community/optical_sensors/articles/measuring_distance_with_light/index.html
- http://www.sdrobots.com/tech-thursday-012-pulsedlight-lidar-lite/
- https://mplnet.gsfc.nasa.gov
[/expand]
One Wire Serial Communication
Glen Browne | November 16th, 2017
Loading...
Overview
An examination of one wire serial communication and how to set up a simple transfer using Arduino. Includes a definition of functions and to communicate over the single wire interface. Preformed a practical experiment connecting a one-wire digital temperature sensor to an Arduino, implementing all code for the interface.
[expand title=”References” tag=”h4″]
- https://en.wikipedia.org/wiki/1-Wire
- http://www.microchip.com//wwwAppNotes/AppNotes.aspx?appnote=en591191
- https://www.maximintegrated.com/en/app-notes/index.mvp/id/126
- https://forum.pjrc.com/threads/23939-Strange-behavior-on-the-Onewireslave-library?p=33608&viewfull=1#post33608
- https://create.arduino.cc/projecthub/TheGadgetBoy/ds18b20-digital-temperature-sensor-and-arduino-9cc806
- https://www.hacktronics.com/Tutorials/arduino-1-wire-address-finder.html
- https://en.wikipedia.org/wiki/Cyclic_redundancy_check
- https://www.maximintegrated.com/en/app-notes/index.mvp/id/27
[/expand]
PID Controllers
Jordan Smallwood | October 4th, 2017
Overview
The definition of Proportional Integral Derivative (PID) in order to provide feedback and control. States the foundations for a simple PID controller for controlling line following robots. An in-depth look with examples of integration into a line following robot in C++.
[expand title=”References” tag=”h4″]
- https://en.wikipedia.org/wiki/PID_controller
- https://www.cds.caltech.edu/~murray/courses/cds101/fa04/caltech/am04_ch8-3nov04.pdf
[/expand]
Power Management Integrated Circuits
Tai Nguyen | November 5th, 2017
Overview
Research into Power Managment Integrated Circuit (PMIC) and how their components of linear regulators, voltage regulators, and switch regulators are each used in particular cases. Compares the different regulators for trade-offs inefficiently, voltage output levels, current output, cost, and reliability. Also includes a discussion on load switches, inrush current and polarity protection.
[expand title=”References” tag=”h4″]
- https://www.jameco.com/Jameco/workshop/learning-center/voltage-regulator.html
- https://www.digikey.com/en/articles/techzone/2017/sep/understanding-the-advantages-and-disadvantages-of-linear-regulators
- https://www.dimensionengineering.com/info/switching-regulators
- http://www.newelectronics.co.uk/electronics-technology/the-benefits-of-using-non-isolated-dc-dc-converters/141523/
- https://www.edn.com/electronics-blogs/power-supply-notes/4401305/Isolated—non-isolated-DC-DC-converters
- https://www.youtube.com/watch?v=WDuvCitCyOw
- https://www.fairchildsemi.com/datasheets/FP/FPF2495.pdf
[/expand]
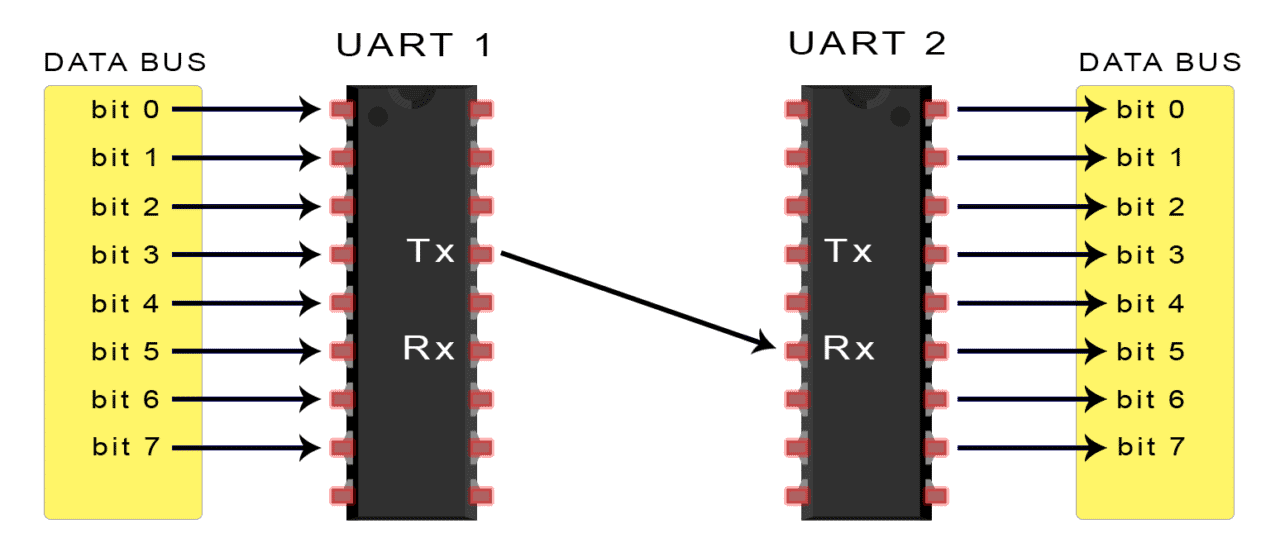
UART – Universal Asynchronous Receiver-Transmitter
Glen Browne | October 20th, 2017
Loading...
Overview
Research into the general use of UART and USART with a focus on the implementation in Atmega 32U4. Includes a guide to configuring USART on the 32U4 in C++ with example code.
{kind=link}
{kind=link}
Ultrasonic Sensors & Applications
Ivan Lopez | October 10th, 2017
Loading...
Overview
Study of ultrasonic sensors and how they operate to calculate the distance between the sensor and an object. Plus, a look into the limitations of the sensors in use cases. Includes a configuration guide for sensor readings in C++. Provides a real-world demonstration of ultrasonic triangulation of an object in realtime using Matlab integrated with Arduino.
Ultrasonic Triangulation Package (Includes MatLab code and Ardunio)
{kind=link}
Virtual Reality vs Augmented Reality & Virtual Maze Implementation
Mark Huffman | November 11th, 2017
Loading...
Overview
A look at the differences between Virtual reality and Augmented reality. Comparison of the projection, recognition, tracking, and optics of each type. Includes a practical experiment of syncing with an Arduino and traveling through a virtual maze in real time using the 3D engine Unity combined with Bluetooth and Arduino C++ code. Full example and implementation provided with an easily adaptable code to any 3Dot for the same virtual/real physical maze.
VR Package (Includes Virtual Maze Program & Ardinuo implement file)
[expand title=”References” tag=”h4″]
- http://www.realitytechnologies.com/augmented-realityhttp://www.wikitude.com/blog-shaping-future-technology-slam/
- http://www.sciencedirect.com/science/article/pii/S1877705812019698
- https://www.forbes.com/sites/quora/2017/01/09/how-do-augmented-reality-displays-work/#2cc085e47315
- http://www.ps-tech.com/3d-technology/optical-tracking
- https://github.com/ashtuchkin/vive-diy-position-sensor/
- https://trmm.net/Lighthouse#HTC_Vive_Lighthouse
- http://stanford.edu/class/ee267/lectures/lecture7.pdf
[/expand]
Wireless Transceiver nRF24L01+
Roy Benmoshe | December 2nd, 2017
Loading...
Overview
Research into the nRF24L01+ wireless transmitter and receiver for 2.4Ghz ISM. Explains 2.4Ghz antenna’s, practical uses and compares the useable range of different antenna types. Lays the basis for wireless triangulation using speed-over-air calculations.
[expand title=”References” tag=”h4″]
- https://arduino-info.wikispaces.com/Nrf24L01-2.4GHz-HowTo
- https://learn.sparkfun.com/tutorials/nrf24l01-transceiver-hookup-guide
- http://howtomechatronics.com/tutorials/arduino/arduino-wireless-communication-nrf24l01-tutorial/
- https://www.allaboutcircuits.com/technical-articles/wi-fi-antennas-part-1-fundamentals/
- https://www.nordicsemi.com/eng/Products/2.4GHz-RF/nRF24L01P
- http://www.futureelectronics.com/en/wireless-rf-radio-frequency/transceiver-ics.aspx
[/expand]
Ultrasonic sensor , Fall 2018
Author/s: Shweta Hebbalkar
Table of Contents
Introduction
As name implies this device uses an ultrasonic sound to measure the distance between itself, and the nearest solid object. Like if we take the nature’s example then it would be like Bats detecting shapes from sound. Also, There are many applications for ultrasonic sensors, such as in intrusion alarm systems, automatic door openers and backup sensors for automobiles.
Features:
- Operating Voltage: 5V DC – VCC = 5 volt power connection
- Operating Current: 15mA – TRIG = trigger pin (input)
- Measure Angle: 15° – ECHO = Echo pin (output)
- Ranging Distance: 2cm – 4m – GND = Ground
Theoretical Explanation of the ultrasonic sensor:
Let’s look in more depth, ultrasonic Waves are sounds, which cannot be heard by humans and are normally, frequencies of above 20kHz. Here are the basic characteristics of ultrasonic waves in wavelength and Radiation a velocity of wave propagation is express by multiplication of frequency and wavelength. The velocity of an electromagnetic wave but the velocity of sound wave propagation in air is as slow as about 344m/ s (at 20°C). At these slower velocities, wavelengths are short, meaning that higher resolution of distance and direction can be obtained. Because of the higher resolution, it is possible to get higher measurement made large accuracy. The surface dimension of the ultrasonic device can be easily to obtain accurate radiation. In order to detect the presence of an object, ultrasonic waves are reflected on objects. Because metal, wood, concrete, glass, rubber and paper, etc. reflect approximately 100% of ultrasonic waves, these objects can be easily detected. Cloth, cotton, wool, etc. are difficult to detect because they absorb ultrasonic waves. It may often be difficult, also, to detect objects having large surface undulation, because of irregular reflection.
In this illustration explains how the ultrasonic sensors works, the solid curve lines are transmitting singles and the dotted curves line are reflective singles. 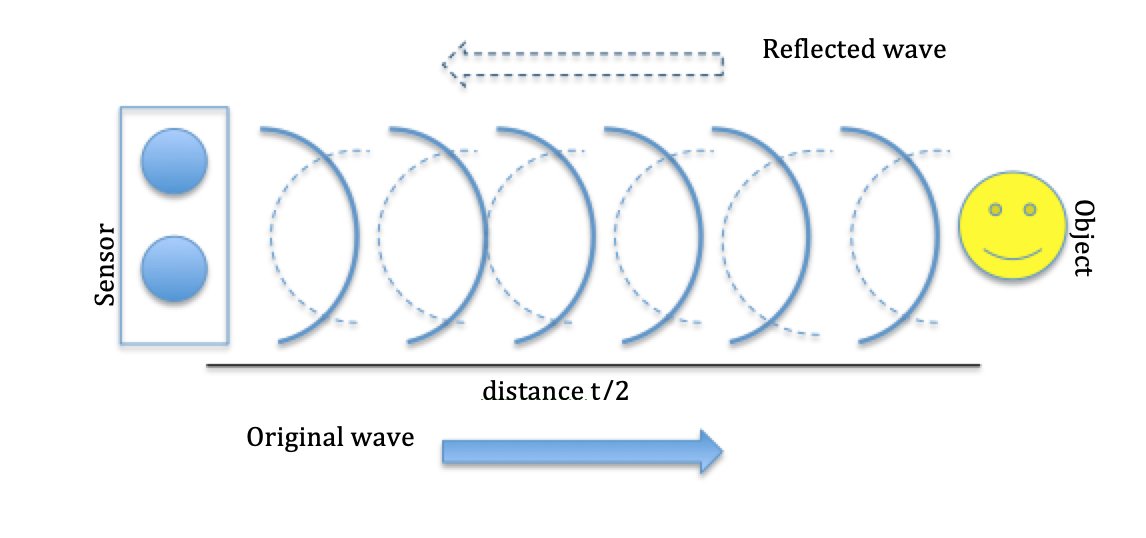
In order to generate the ultrasound you need to set the Trig on a High State for 10 µs. That will send out an 8 cycle sonic burst, which will travel at the speed sound, and it will be received in the Echo pin. The Echo pin will output the time in microseconds the sound wave traveled.