![]()
By Kristine Abatay, Project Manager
main()
{
printf(“hello, world!”);
}
It is a new semester at Robot Company and with it, a new Spiderbot!
Our mission: construct a six-legged robot that will match the speed of the Robot Company’s rover project, operate safely, and have the capability of maneuvering a route in a natural setting.
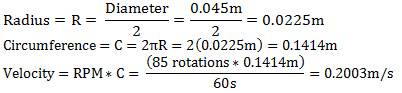
This robot will have a spider-like appearance and walk, but with six legs instead of eight, all the while being controlled wirelessly using an application for Arxterra, designed for Android smart phones. Spiderbot will achieve a speed of 0.2003 m/s on a flat surface – the calculated speed using specifications from components of the rover project last semester.
Click to see the calculation used to determine this speed requirement:

The natural setting that Spiderbot will be able to maneuver is located on the East Wing of the CSULB campus as shown by the following map:

Our group surveyed the area and created a route for Spiderbot to complete as indicated in the picture above and the total length measured to roughly 42 m. This is the same path that will be used to test both the Rover and the Hexapod projects. A quick run through of the route can be found in the following link:
The pictures below are some of the obstacles encountered while surveying the Spiderbot route. A sprinkler head with a height of roughly 4 inches and a branch with a width of 2.5 inches were the most notable obstacles. These measurements will dictate the overall body design of our Spiderbot. In addition to these design requirements, our Spiderbot will function properly while following the health and safety policy of the engineering department of CSULB (found here: http://www.csulb.edu/colleges/coe/views/safety_and_environment/safety_policy.shtml).

Our date of completion is set for May 12, 2014 so stay tuned for future updates as we progress in our construction of Spiderbot!
Leave a Reply
Want to join the discussion?Feel free to contribute!