{kind=link}
Spring 2016 AdBot Stall Current Test
By Don T. (Mission, Systems, and Test)
Experiments
AdBot was taken to lab equipment to measure the motor specifications. Some multimeters have a 0.020 A limit. The torque test apparatus was used on motors. 1K, 5K, 10K, and 20K potentiometers could not stall the motors. The motor shafts were held onto a bearing by a screw and the bearing was attached to a wheel. This was done in order to provide grip to cause stalling.
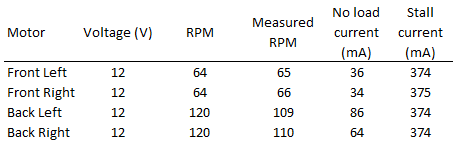

Figure Torque Test Apparatus

Figure Stalling a motor attached to a free running motor by grip

Figure Measuring no load current

Figure Stalling the motor manually

The wheel torque equation is shown above as the force perpendicular to the wheel radius. To test the wheel torques, use the corresponding formula. Attach a mass to one motor. Apply the rated voltage to the motor and measure the height and count the number of revolutions. The data for torque data and constant current draw are shown here.
How to calculate the force of the wind
Start with a conservation of momentum model.
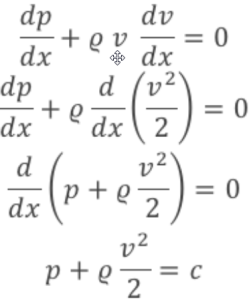
p = pressure (Pa)
rho = density (kg/m3)
v = velocity (m/s)
x = distance (m)
p = static pressure, Ps = 0
(rho*v^2)/2 = dynamic pressure, Pd
c = total pressure

rho_air = 1.225 kg/m3
vw = 17.9 mph
The wind force is the product of dynamic pressure and surface area of an obstacle.
F_w = P_d * A_s
Fw = wind force (N)
Pd = dynamic pressure (Pa)
A_s = surface area (m2)
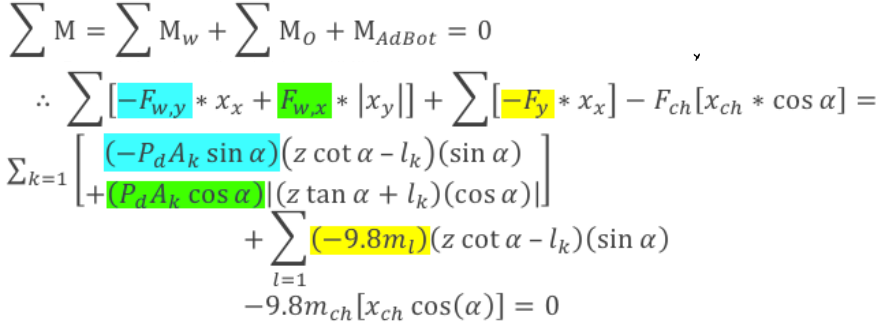
As AdBot is about to tip over, it loses full contact with the ground, except at one point. AdBot balances on this point and does not collapse left or right. Thus, the sum of the moments about this pivot is zero. The calculation to find where to put the beam on AdBot’s chassis is as follows.
Mw = moments (N*m) due to wind force on objects (wind against phone, sign, and beam)
MO = moments due to objects (phone and beam)
MO = moment due to AdBot’s chassis
Fw,x or y = wind force in the x- or y-direction relative to the earth (N)
xx = horizontal distance (m), which is parallel to earth, beginning from the single pivot point
Fy = object weight (N)
9.8 = gravitational acceleration (m/s2)
Fch = chassis weight (N)
alpha = tilt angle (°)
xch = half-chassis length (m), a.k.a. chassis center of mass
m = mass
A = object’s surface area
l = object’s location of center of mass along the beam
alpha = tilt angle
z = distance from the chassis’s edge to the beam’s base making M_summation = 0
When M_summation is negative, the direction of rotation is clockwise relative to the three-axes drawn, and AdBot lands upright.
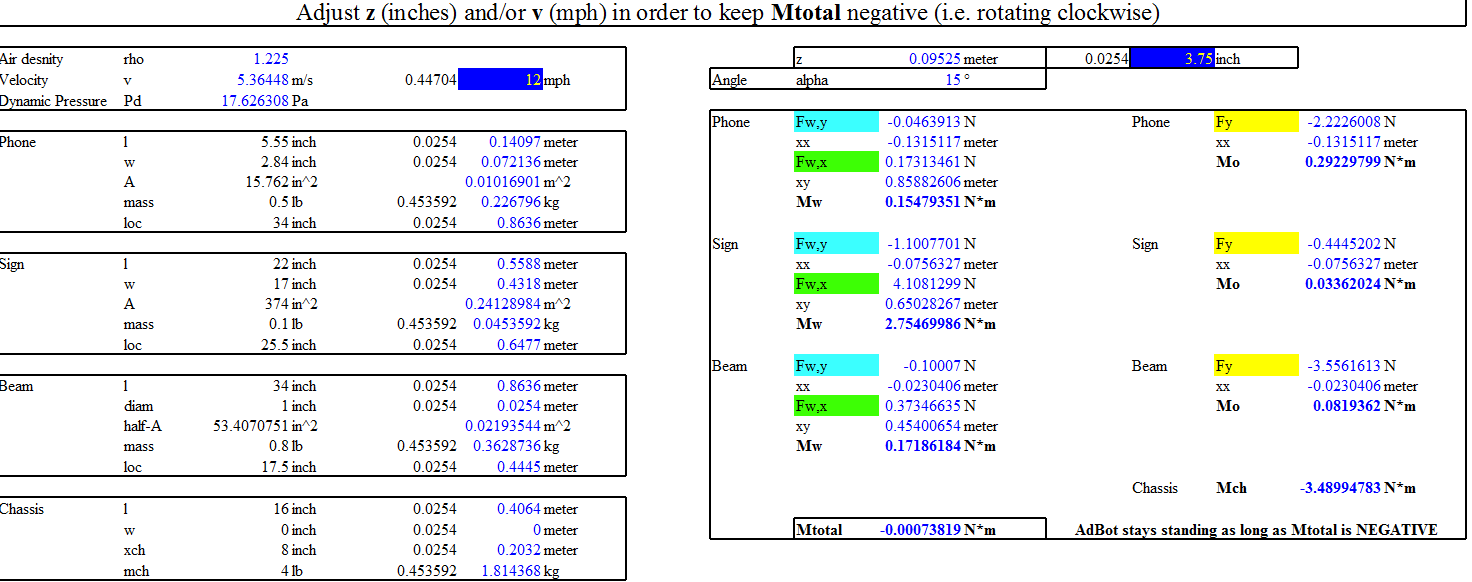
Figure Wind force calculation setup