/wp-content/uploads/2013/04/Arxterra-Logo-340x156.png00Jaap de Dood/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJaap de Dood2021-03-25 23:25:072021-05-03 12:36:48Programming the 3DoT using USBasp
/wp-content/uploads/2013/04/Arxterra-Logo-340x156.png00Jaap de Dood/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJaap de Dood2020-03-18 12:01:212020-03-23 13:30:043DoT Custom Command Example – ArxRobot_Telecomm_Servo
/wp-content/uploads/2013/04/Arxterra-Logo-340x156.png00Jaap de Dood/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJaap de Dood2020-02-19 12:38:122020-02-19 12:38:123DoT v9.05 HM-11 Fix
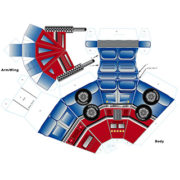
https://www.arxterra.com/wp-content/uploads/2018/09/26_OptimasPrime_HedKase.jpg320320Jaap de Dood/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJaap de Dood2019-10-29 08:30:502019-10-29 08:34:16How To Fold the PaperBoT Paper Skin
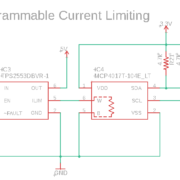
https://www.arxterra.com/wp-content/uploads/2019/10/currentlimitcircuit.png501709Jaap de Dood/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJaap de Dood2019-10-14 14:44:022020-03-18 15:49:32Programming the 3DoT Current Limiter
/wp-content/uploads/2013/04/Arxterra-Logo-340x156.png00Jaap de Dood/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJaap de Dood2019-09-18 15:29:502019-09-18 15:41:21Machine Code Workshop 2
/wp-content/uploads/2013/04/Arxterra-Logo-340x156.png00Jaap de Dood/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJaap de Dood2019-09-17 13:27:162019-09-19 08:31:36Machine Code Workshop
/wp-content/uploads/2013/04/Arxterra-Logo-340x156.png00arxterra/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngarxterra2019-08-24 10:52:462019-08-24 10:54:44Introduction to Arduino Machine Language Programming