{kind=link}
Spring 2018: BiPed Initial Design Sketches
By: Miguel Gonzalez (Project Manager & Manufacturing)
Approved By: Miguel Garcia (Quality Assurance)
Related Requirements
Level One Requirements
L1-3: Micro FOBO will have 2 legs.
L1-4: Micro FOBO will be a toy robot based on the design of the FOBO by Jonathan Dowdall.
Level Two Requirements
L2-3: Micro FOBO will use SG90 micro servos.
L2-14: Micro FOBO shall measure within 4.5” x 3.25” x 7.25”.
Initial Sketches and Design
Since our robot was going to be based on the original FOBO created by Jonathan Dowdall we first needed to do some observation on his design. The original FOBO measured 24cm ( 9.5″) tall and 15.25cm ( 6″) wide. Because we are creating a miniature version of this design we can measure the servo size the original FOBO had with the micro servos we plan to use. As fig.1 shows, we can measure the two different servos and calculate their perspective ratio size with one another to give us an approximation of how small we can make our robot.
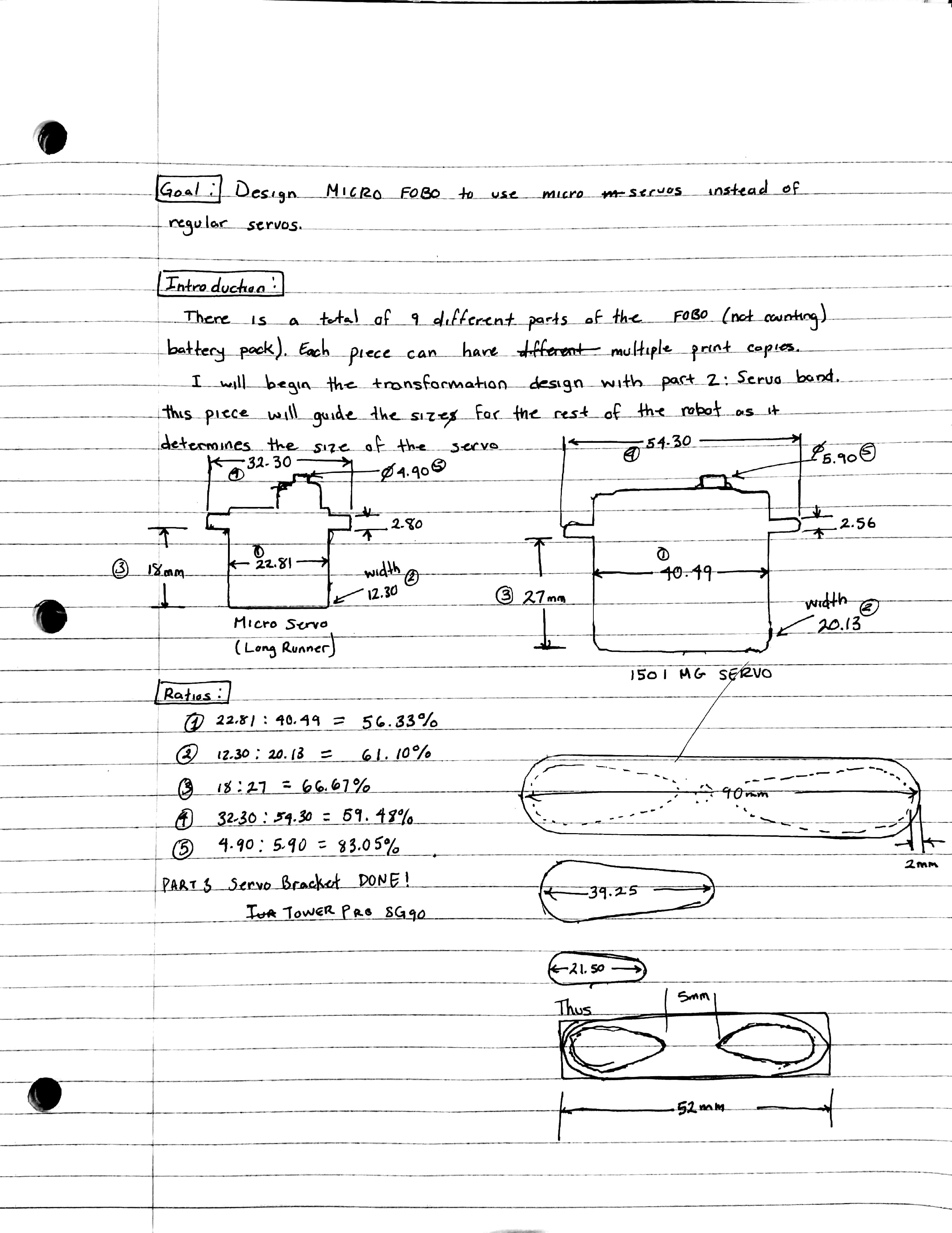
Fig.1 Calculating Ratio Sizes
Various ratios were calculated from the measurements of the two servos and we discovered that our micro version of FOBO will be approximately 60% scale of the original FOBO. This is quite a significant reduction. Now that we had our ratios and measurements of the servos we could begin by sketching some of the FOBO parts and incorporate them to suit our miniaturized robot. The servo band and servo bracket were one of the first parts to be sketched and design since these parts attached the servos onto the FOBO’s leg. Measurements from the servos and the servo horns make up the dimensions of these parts. Since the micro servos were designed to be pressure fitted onto some of the parts small tolerances where only acceptable. It was made sure to only use datasheet measurements with verified dimensions from caliper measurements.
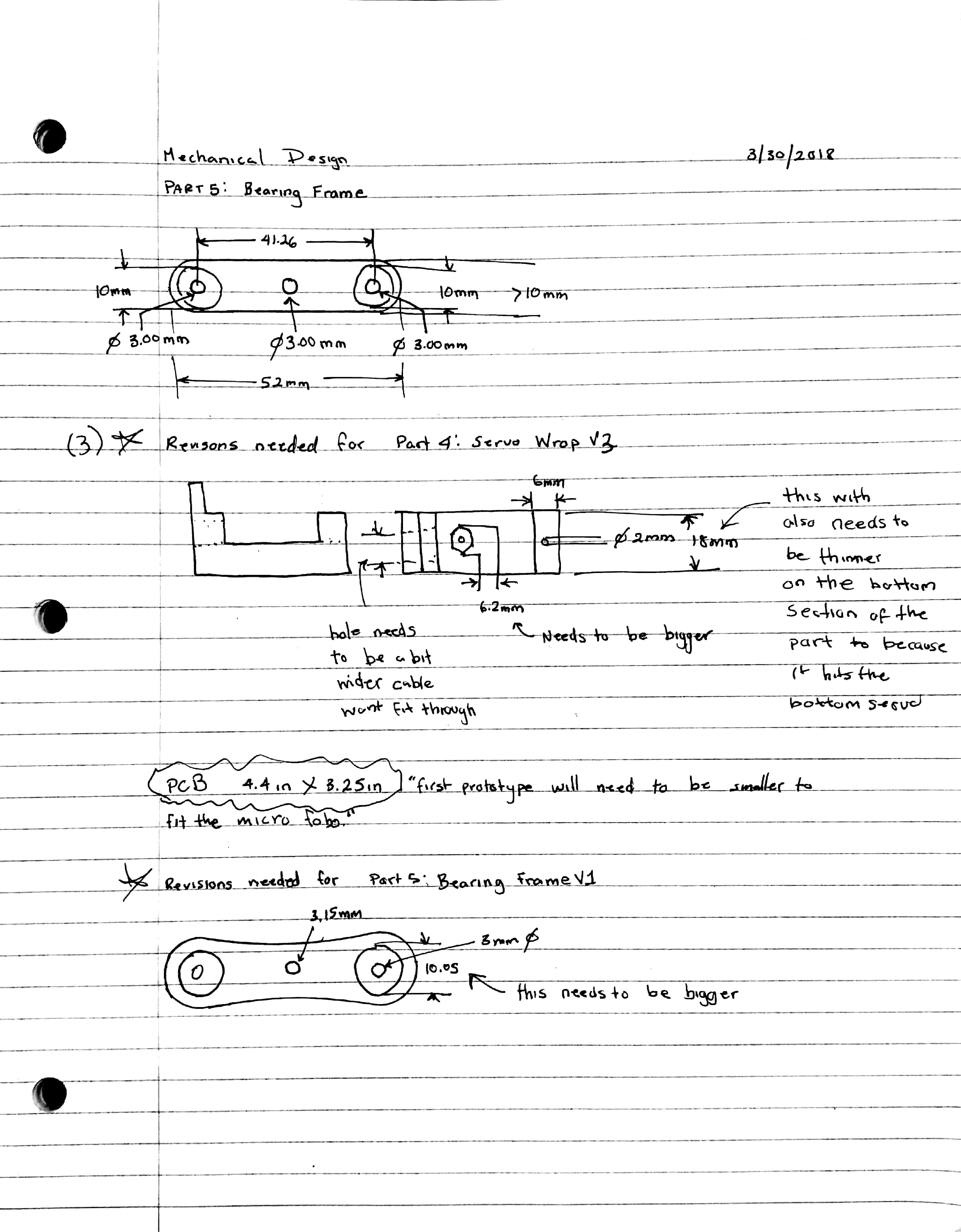
Fig.2 Sketches of Bearing Frame and Servo Wrap
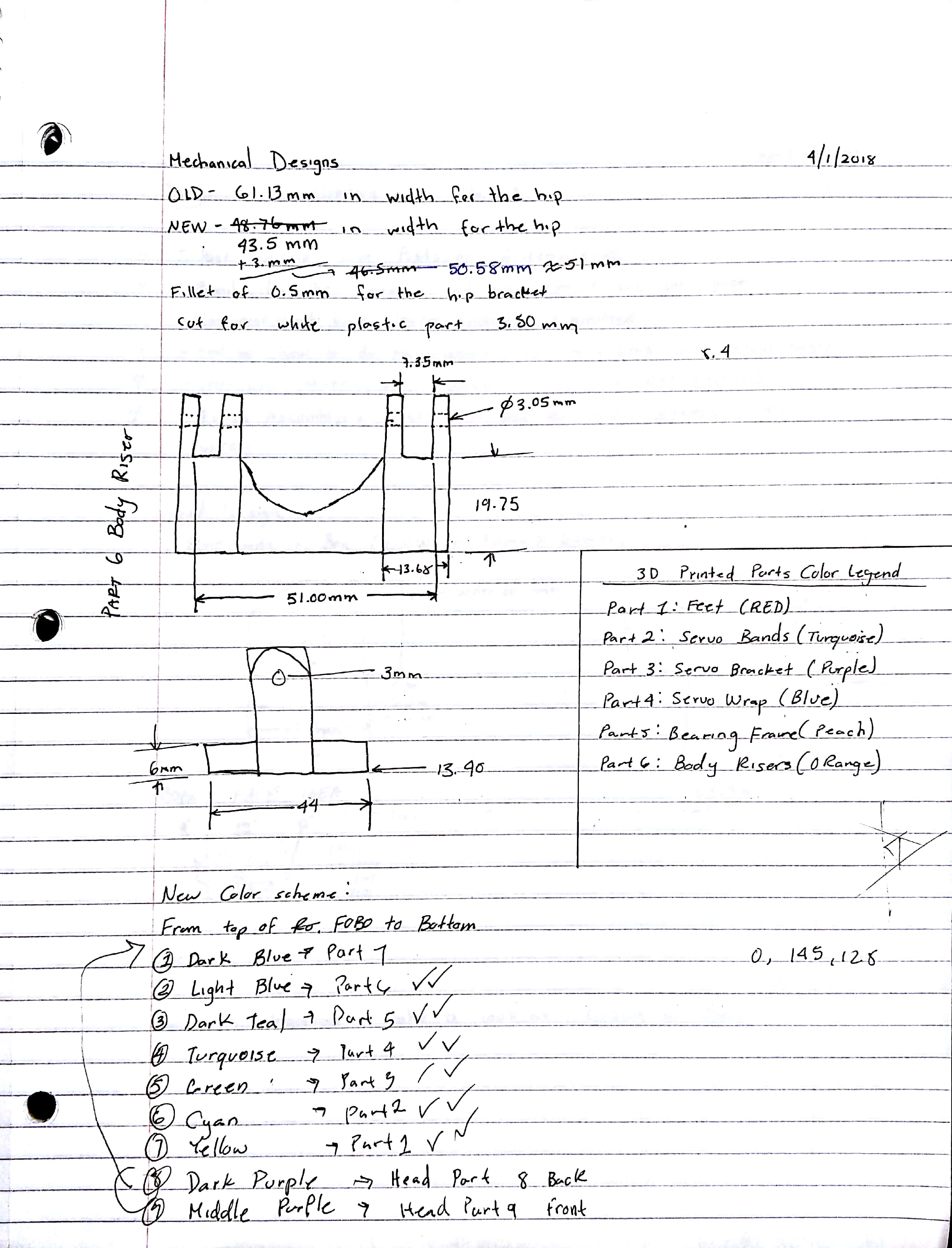
Fig.3 Body Riser Sketches
Many of the initial sketches have inaccuracies in their stated dimensions, this is due to the fact that testing and fast prototyping is needed to verify that the pieces would fit together. When designing the head of the robot it became evident that simply reducing its size by 60 percent of the original FOBO will not be sufficient. The head of micro FOBO is reliant on the size of the 3DoT board and the shield that will be mounted on it. Rough estimates on the dimension of the controller board were guessed in order to begin an initial sketching of the robot’s head. Once the head had been sketched it became evident that we can do some designs on its face to better meet the robot’s requirement of looking like a toy. This meant that we could use the ultrasonic sensors to look like eyes and thus we can design a nose and mouth to finish the face features. Antennas were also sketched on the head of the robot to simulate how toy robots looked like in the 1950s.
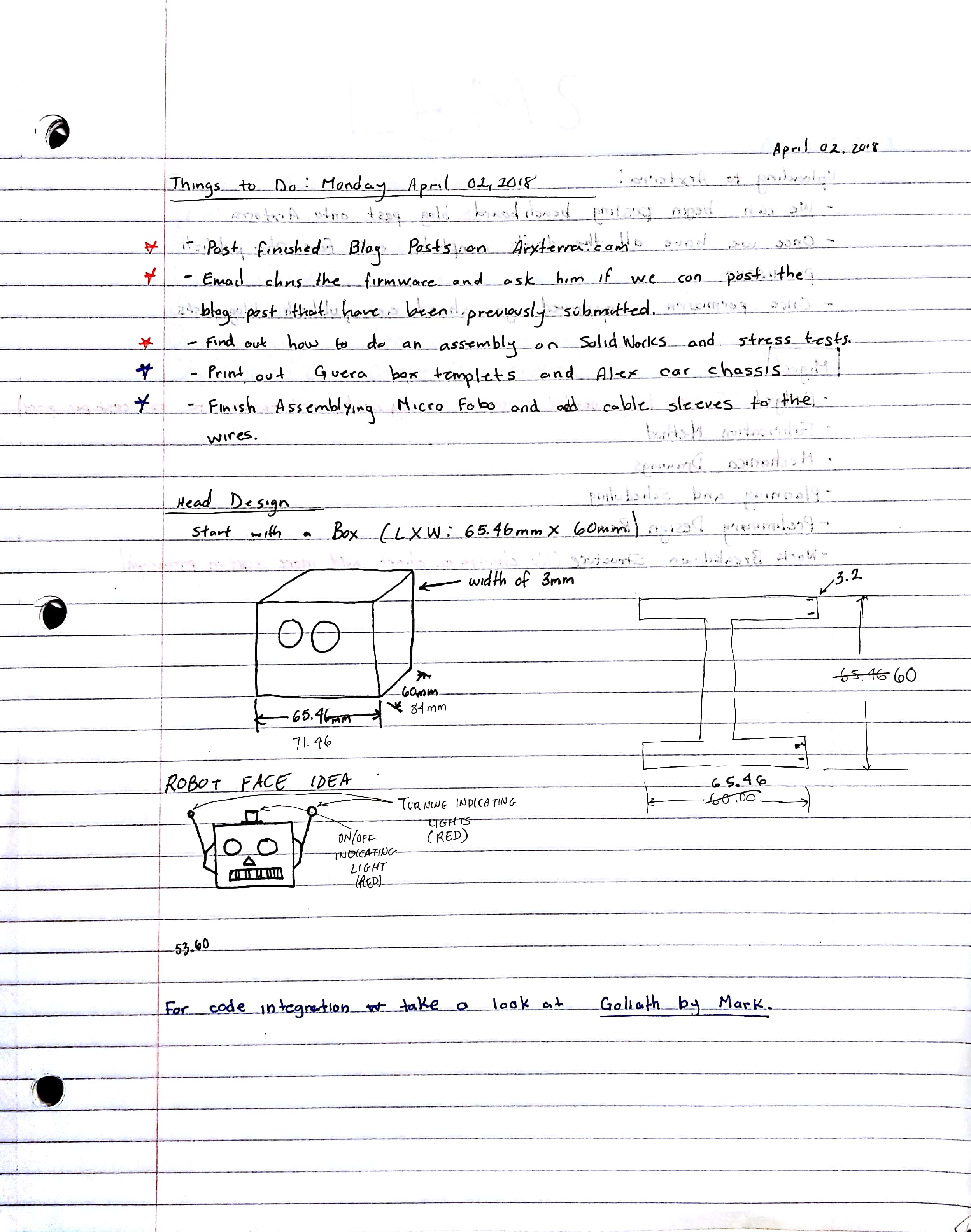
Fig.4 Head Sketches
Fig.5 Full Body Sketch