Spring 2016 Pathfinder: Mission Profile and Project Objective Update
By:
Peiyuan Xu (Project Manager)
Table of Contents
Mission Profile Update
The team received the PDR debrief from meeting with the customer, student assistant and the president. One of the comments they had was that the mission profile was unclear. The team then develop a new mission profile which will clarify the confusion of the current one.
{kind=link}
{kind=link}
Mission Profile:
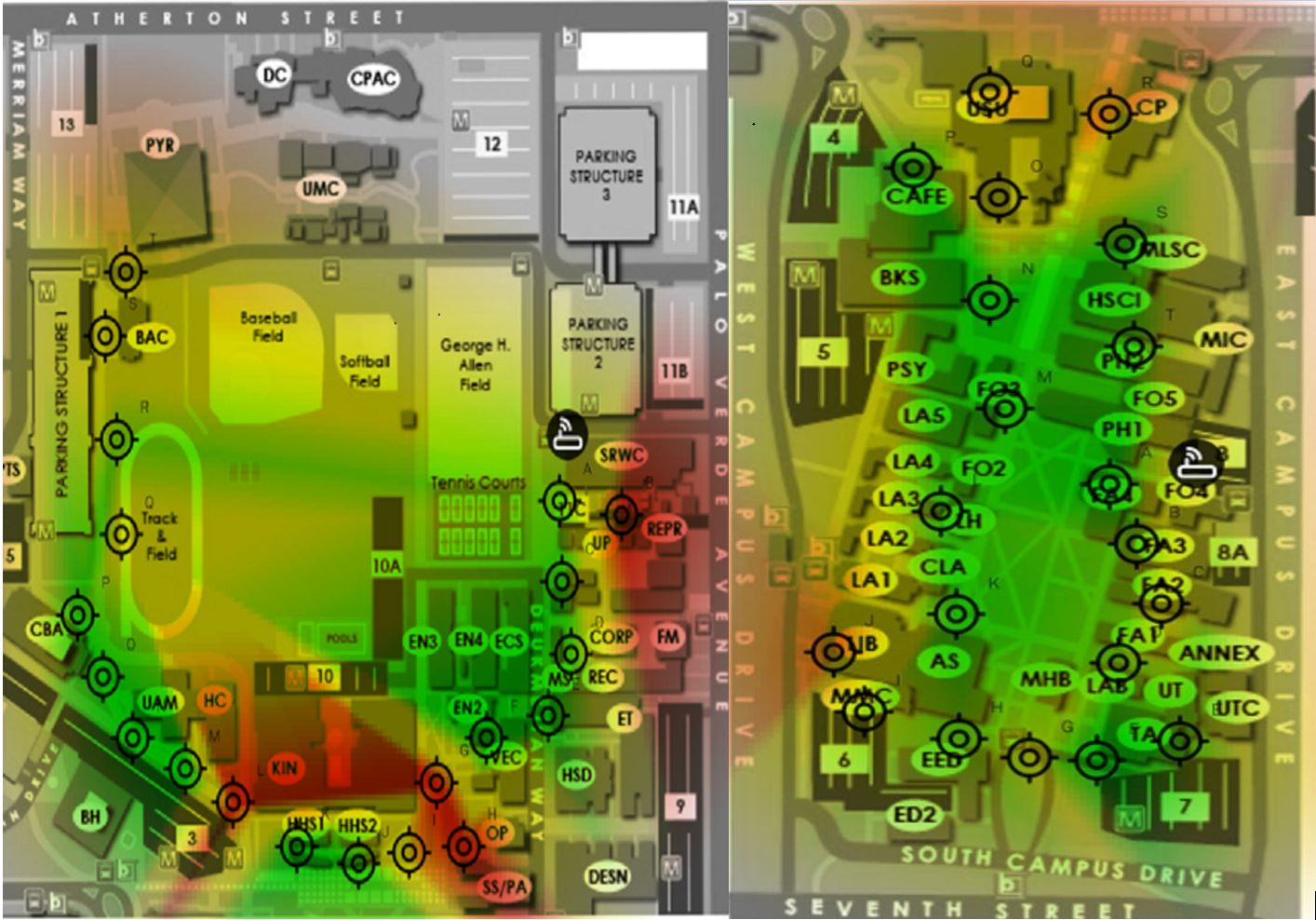
Since our Pathfinder Rover will be tested at the entire CSULB campus. We need to find out where there is the best Wi-Fi signal in order to gain the stable video stream on Arxterra. The system engineer Xiong Lee was able to use an android App called Wi-Fi Maximiser to map out the Wi-Fi signal strength around CSULB campus. Based on the strength of the Wi-Fi signal, our mission will be narrowed down to the area covered with green on the map. We suggest the customer not to go through the area covered with red because there might be some packet loss and signal lag around the area. We also think this Wi-Fi signal strength map can be useful for other EE 400D project in which case they need to explore the CSULB campus as well.
Project Objective Update
The team received new requirements from the customer to design a new Pathfinder Prototype using Rocker Bogie Suspension system. Therefore, the project objective will be changed to accomplish the new requirements
Previous Project Objective:
The spring 2016 Pathfinder Rover was inspired by the design of NASA’s MARs Exploration Rover-“Sojourner”. The purpose of this Rover is to explore the beauty of CSULB campus at night in a self-sufficient way. The Pathfinder is allowed to have the solar panel charging the battery for up to 8 hours during the day time. Then the customer will spend 4 hours at night walking and exploring with the Pathfinder . The customer can use Arxterra control panel on the PC to navigate the Rover by using the cursor to click a point on the map. This generation of Pathfinder Rover is designed to test and implement SLAM (Simultaneous Localization and Mapping) technology for autonomous vehicles.
Current Project Objective:
The spring 2016 Pathfinder Rover was inspired by NASA’s MARs Exploration Rover-“Sojourner”. The profile for this semester’s project is to imitate the design of “Sojourner” Rover to prototype a new generation of Pathfinder Rover that implements the Rocker Bogie Suspension System as well as being self-sufficient by using solar panels. The Pathfinder is allowed to have the solar panels charging the battery for up to 8 hours during the day time. Then the customer can spend up to 4 hours at night walking and exploring with the Pathfinder. Ultimately, The customer can use Arxterra control panel on the PC to navigate the Rover by using the cursor to click a point on the map. This generation of Pathfinder Rover is also designed to test and implement SLAM (Simultaneous Localization and Mapping) technology for autonomous vehicles.