
Spring 2017 Prosthetic Arm: Servo Rotation Accelerometer Test
The Robot Company | CEO Professor Gary Hill
Blog Post created by Project Manager | Bianca Esquivel
Project Test Executed by Mission, Systems, and Test Engineer | Phuong Tran and Electronics and Control Engineer | Mikael Movsisyan
Table of Contents
Preliminary Information
Test Objective
Purpose: This experiment satisfies the L1 Requirement Integration – Together, the hand and arm shall be able to perform 3 tasks: pick up a cup of water, pick up a Chips Ahoy cookie, and operate a computer mouse to play a game of minesweeper.
Aim: This experiment follows up on the con-ops presented during the Preliminary Design Review, whereby the wrist should only be allowed to rotate at a specific orientation. The aim of this experiment is to allow wrist rotation only when the arm is pointing down.
Materials
Arduino
SparkFun 2 d.o.f. IMU
Arduino UNO
MG996R servo
EMG sensor
Test Set Up
- Connect the output of the IMU/accelerometer to the analog pin 1 of the MCU
- Connect the output of the EMG sensor to analog pin 0.
- Test the accelerometer analog readings and select a threshold value, signifying the accelerometer is pointing in the positive y-axis (as drawn on board).
- Modify the FSM code such that in order for transition from state one to occur, both muscle contraction and the correct orientation conditions must be met.
Accelerometer (on Yellow Breadboard) Analog Readings Test
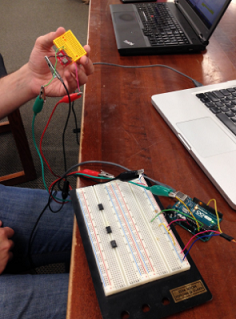
Results
Code ran successfully, and the servo rotated only when the arm was pointing down.
Conclusion
Experiment satisfies the new requirement from con-ops i.e. allow wrist rotation only in specified orientation. The wrist rotates only when the arm is pointing down and the necessary muscle contraction and subsequent relaxation conditions are met.