{kind=link}
Auxiliary Panel Trade-Off Study
By: Adolfo Jimenez (Manufacturing)
Verified By: Jordan Smallwood (PM)
Table of Contents
Introduction
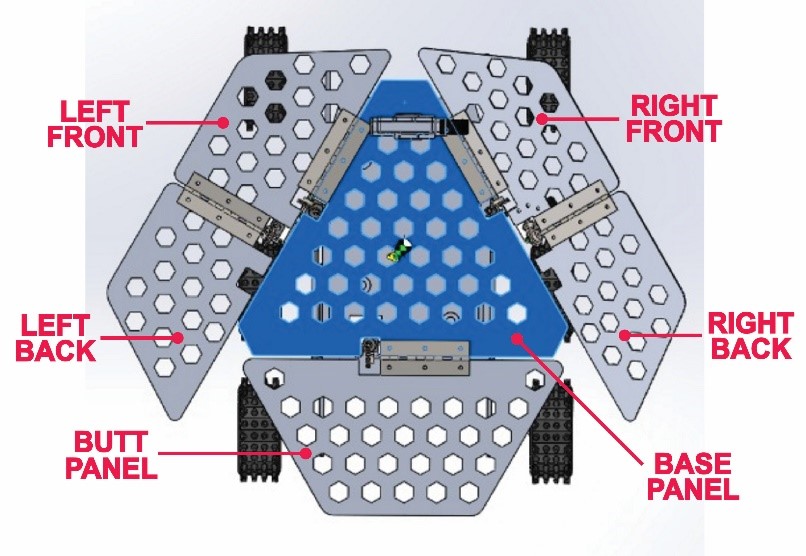
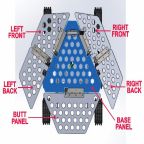
Figure 1: Top View of Solar Panel Structure
One of the requirements for the pathfinder project is that the robot should be able to enter and exit a cocoon state via user input in the Arxterra app. This feature is reminiscent of the original Pathfinder Mars Rover which upon contact of the Martian surface, would emerge from its space pod and out of its cocoon state. The benefit this brings to our robot is that it will allow the storage of the rover in a relatively small space such as a cabinet. Currently, the front panels utilize a worm gear attached to stepper motor to articulate the butt and front panels. The Auxiliary back panels however, are attached to the front panels via a hinge and need to be manually opened and closed. Ideally, this process of entering and exiting the cocoon state would be completely autonomous. The following discusses several possible designs that could be implemented to expand/contract the back panels.
Worm Gear:

Figure 2: Illustration of Worm Gear Mechanism
As mentioned before, the side panels work by using a worm gear attached to a stepper motor. The worm gear rotates a spur gear fixed to a rod within the hinge that pivots the side panels around the base panel. This system, we decided, would be too bulky to be implement onto the back panels. Stepper motors work for the movement of the main panels as the motors are fixed to the base panel however, this would add weight to the front panels and thus more strain on our current stepper motors.
Sliding mechanism:
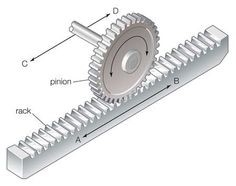
Figure 3: Illustration of Sliding Mechanism
One of our earlier designs involved a sliding mechanism using a rack and pinion gear assembly. This mechanism would have utilized a geared shaft along with a motor to spin and sit under one of the main wings. The system would extend and retract the panels similar to a CD-ROM drive found in a computer. The issue with this design was the amount of space this assembly would have added to the wings.
Linear actuator:
A continuation of the previous design was the use of a linear servo or actuator to push and pull the back panels. The servo/actuator would have been placed underneath the front panels and the rear panels would rest and slide on linear ball bearing side mounts like those found on the sides of cabinets drawers. The issue with this design is the cost, linear servos and actuators are unfortunately quite expensive.
Hinge servo:
Perhaps the simplest and most practical of our ideas was the use of a high torque servo to move a hinge as shown in the video below. The issue with this design is that the back panels would not sit perfectly flush with the front panels. A fix to this might be including a spring to the servo arm to allow the panel to fall by the force of gravity and to pull when needed to be opened.
Pulley and winch design:
Our most exciting design, and perhaps the one with the most “cool factor”, included the use of a winch and pulley system. To achieve the closing of the panels, a constantly closing hinge would have created a closing force that would want to maintain the panel in a shut position. To open the panels, a steel cable running through a series of pullies would be pulled and wrapped around a reel fixed to a motor shaft that would create a pulling force and pry open the panels. The motor would then slowly release tension to re-close the panels. During prototyping of this design, it was discovered that not much actual cable was displaced when pulled to warrant the use of a reel, therefore, a servo and arm attachment could be used to pull and hold the small amount of cable needed to open the panels. It was also discovered that in order to pull the panels open, the force pulling on the rear panel needed to be at an angle. This I because pulling parallel to the panel required a lot more force when compared to pulling at a slight angle. To fix this issue, two pulleys that would lift the cable at slightly an angle would be used on both panels to reduce the force needed to pull back the panel.
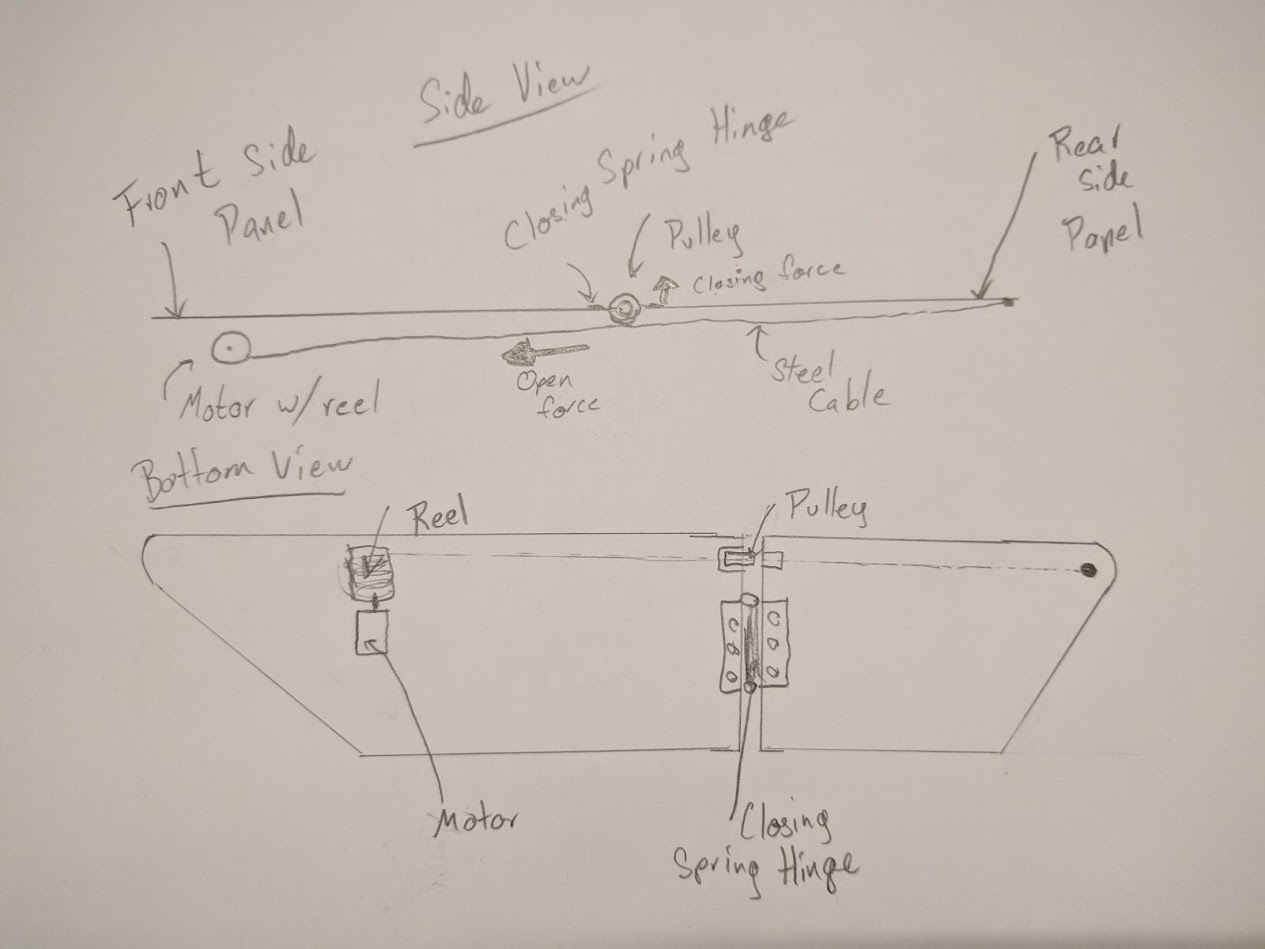
Figure 4: Pulley Design
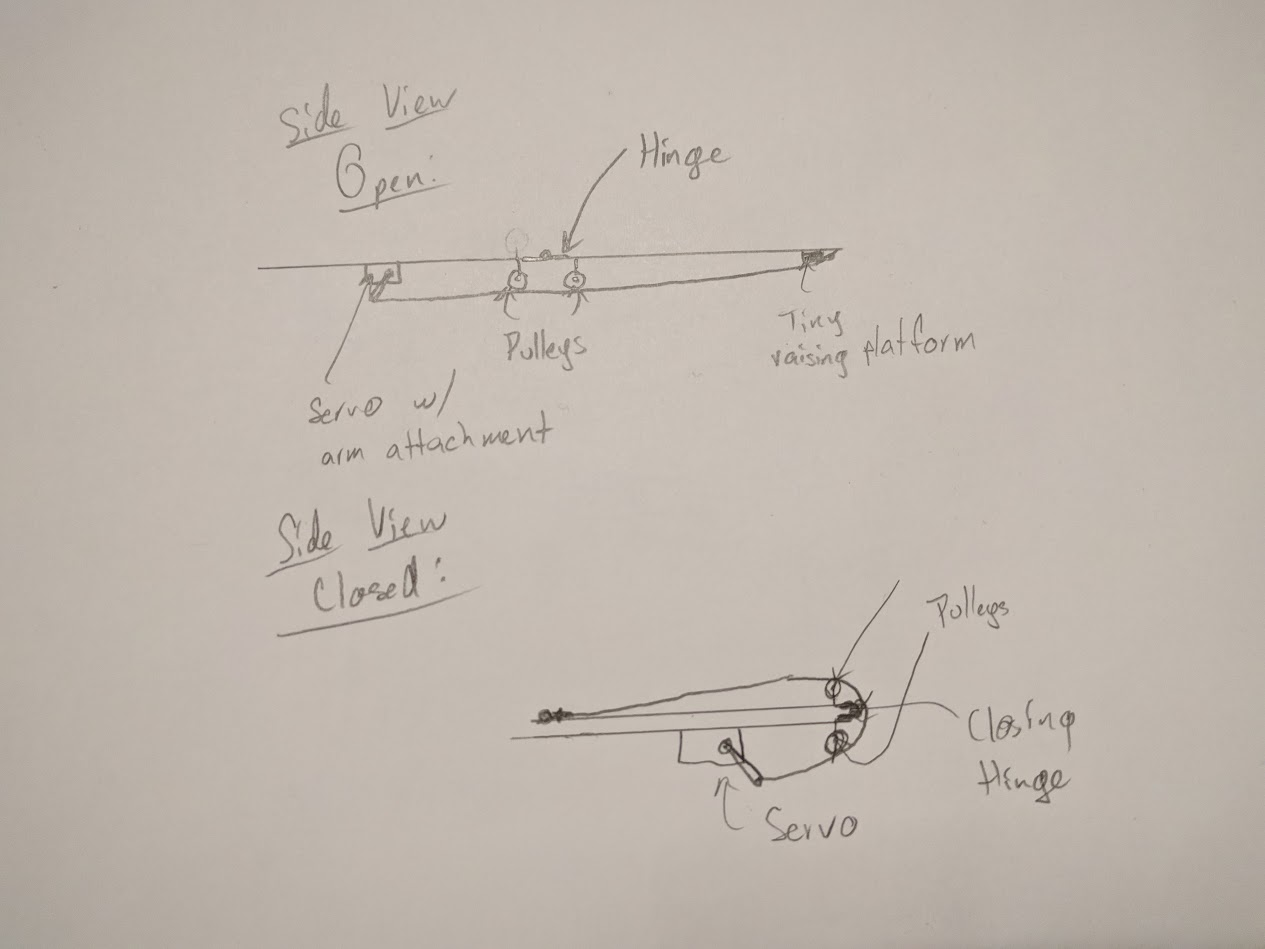
Figure 5: Pulley Design Continued
Spring Hinge:

Figure 6: Spring Hinge Concept
The most rudimentary and cost effective of all our ideas was the use of a spring hinge to open the panels. Similar to the actual Mars rovers, the spring hinge would provide us with the one-time motion of opening the panels. These hinges would be like the hinges used in the previously mentioned pulley design however, these hinges would exert a force in the opposite direction. In order to maintain the panels closed some sort of latch mechanism needed to be included. Two magnets located on the ends of the panels could be used to maintain the panels closed after having them physically shut manually.
Conclusion:
Unfortunately, due to time and budget constraints, we realized after prototyping and research that we would not be able to afford to autonomously close the back panels. A review of our design requirements however, led us to discover that there was no actual requirement that specifically dictated that the system returning the rover into its cocoon state needed to be entirely autonomous. Because of this, our team decided to go with the solitary opening spring hinge design. We hope that future generations of the project however might find this post and our ideas useful to accomplish a fully automatic articulation of the auxiliary panels.