/wp-content/uploads/2013/04/Arxterra-Logo-340x156.png00Israel Mejia/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngIsrael Mejia2020-05-16 17:44:482020-05-16 17:44:48Mod wheels #3 modeling our system and electric differential slip system
https://www.arxterra.com/wp-content/uploads/2020/05/featuredim.jpg20481869Jose/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngJose2020-05-16 16:48:452020-05-16 16:48:55Research & Trade Off Studies : Super-Capacitor and Metal Gear Motors
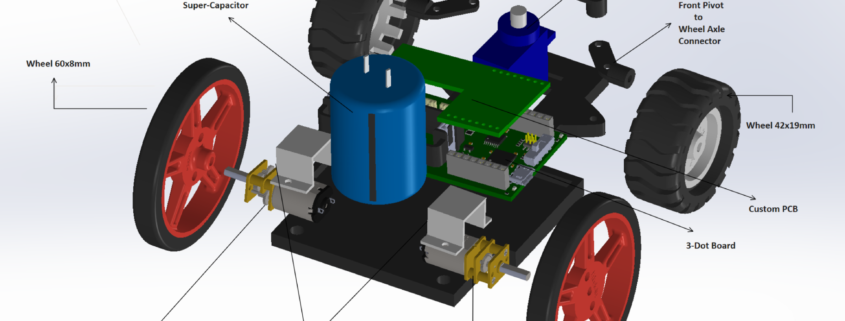
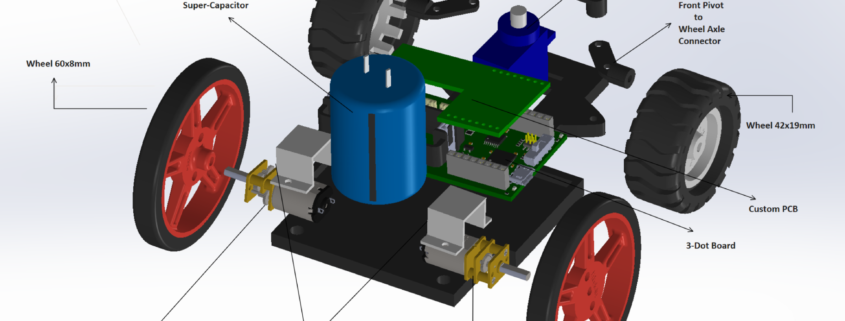
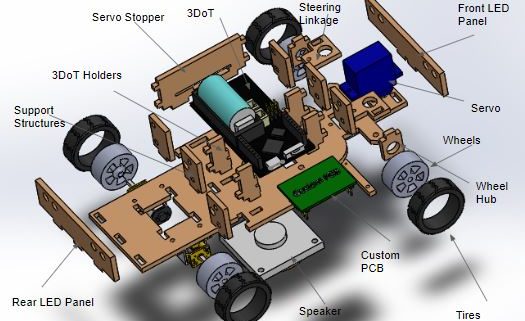
https://www.arxterra.com/wp-content/uploads/2020/01/EE400Danno-exploded-view.png13321920Christopher Hirunthanakorn/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngChristopher Hirunthanakorn2020-01-28 16:12:282020-05-19 11:13:59Spring 2020: ModWheels Final Blog Post