Spring 2016 3DOT Goliath, 3D Printing Requirement: “Round One”
By: Rickeisha Brown (Manufacturing Engineer)
As a level one requirement, the customer requests to refrain from exceeding a total of 6 hours 3D printing time and not to exceed two hours per printed component. The customer has a project total budget of which ultimately limits the amount of spending power per division. Printing Cost estimates which is of total budget.
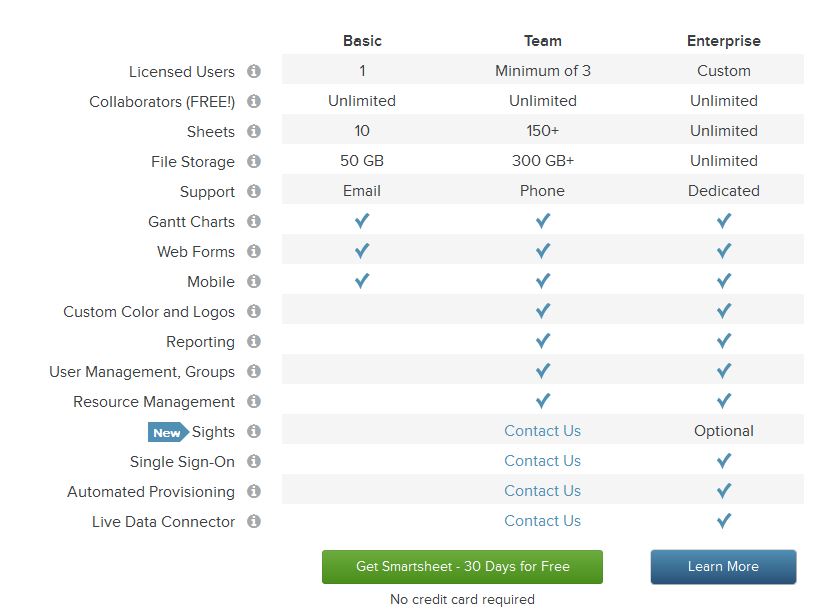
Maker’s Society is the organization handling our 3D prints. Their printers can print multiple parts at a time, they’re conveniently located on the campus of CSULB, and are reasonably priced to $5 per hour. Visit their website for more details regarding Maker’s Society and the services they offer: http://lbmakersociety.org/about-us/.
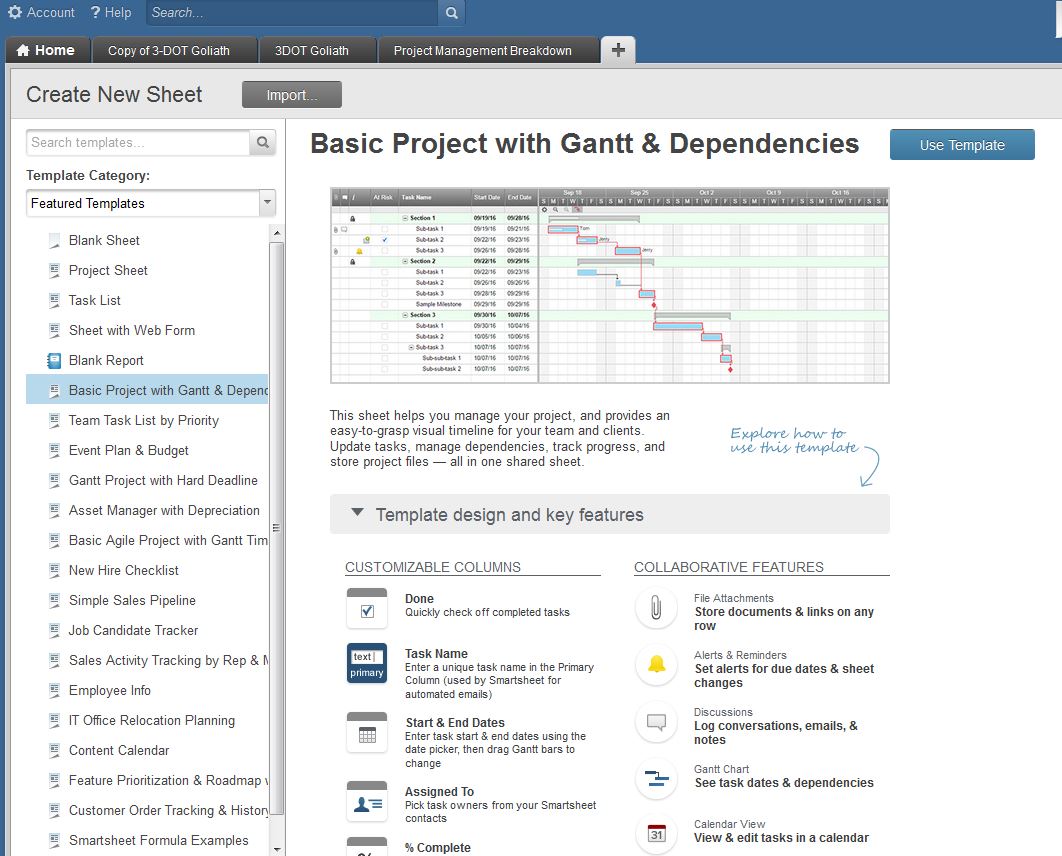
I submitted my design to Carlos Vergara1, the AESB representative, and informed him of my 6 hour printing requirement. He uploaded the parts to a program which examines each component and estimates total printing time down, to the minute.
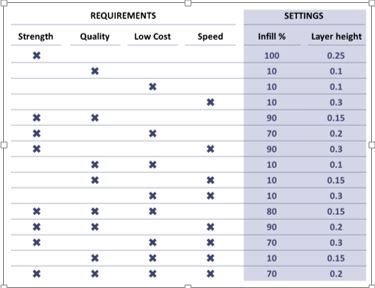
Figure 1: The table above shows the trade-offs between strength, quality, low cost, speed vs. layer height. 2
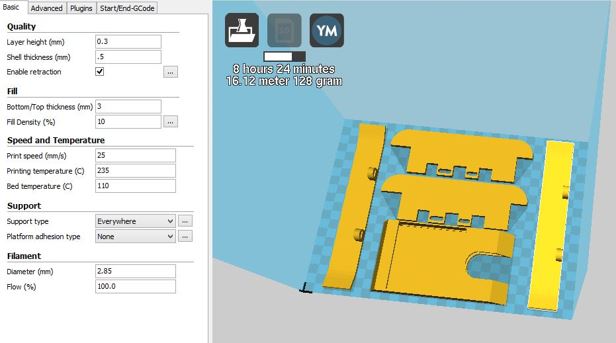
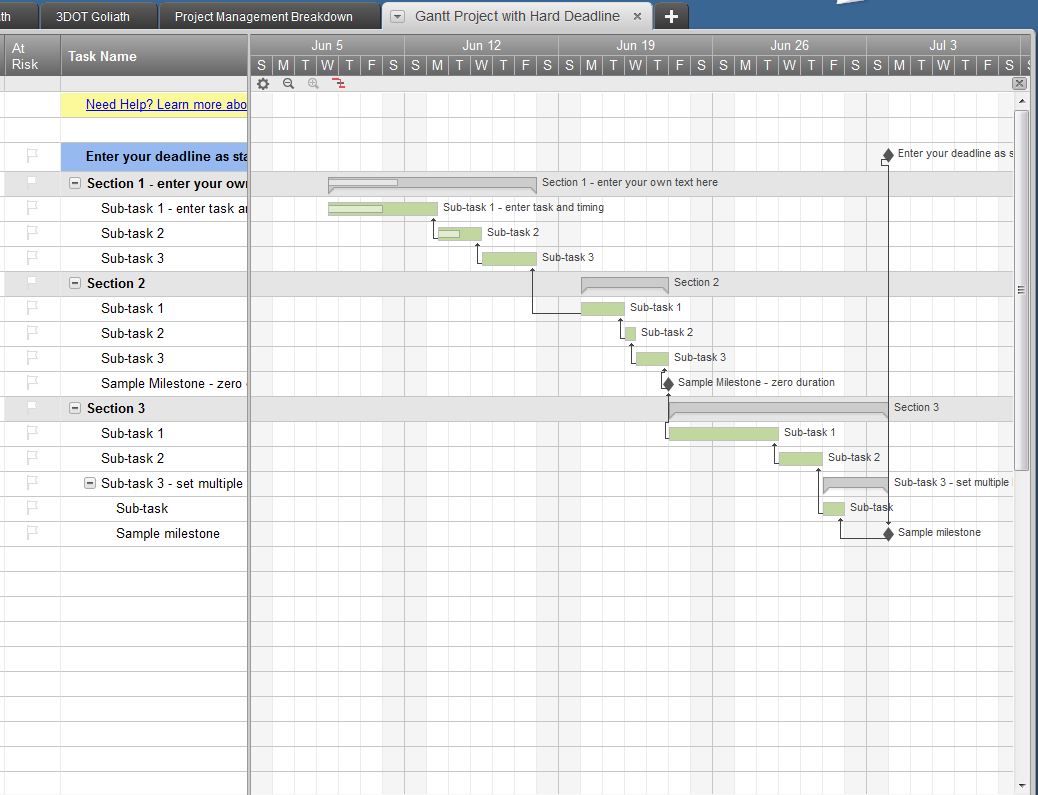
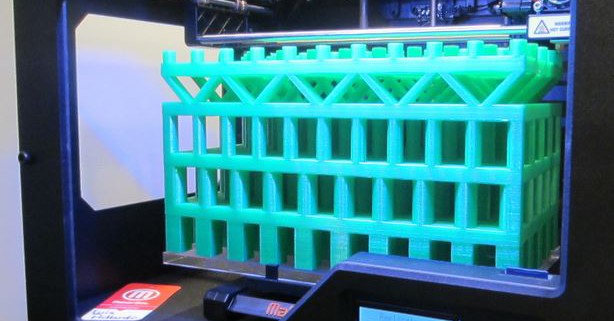
Figure 2: Maker’s Society printing time estimates for the original body with 0.3 mm layer height: 8 hours and 24 minutes.
Figure 2 shows the results for total printing time of Goliath components with 0.3 mm layer height, with 0.2 mm being an ideal layer height based on Figure 1.
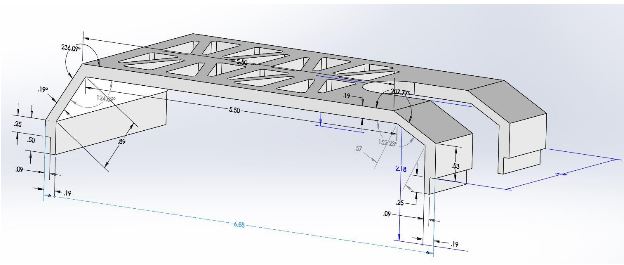
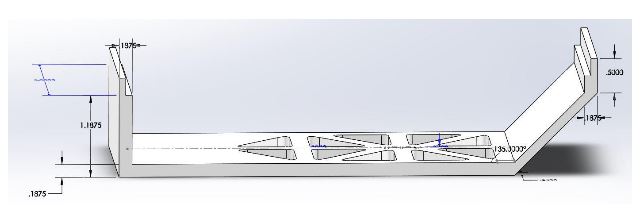
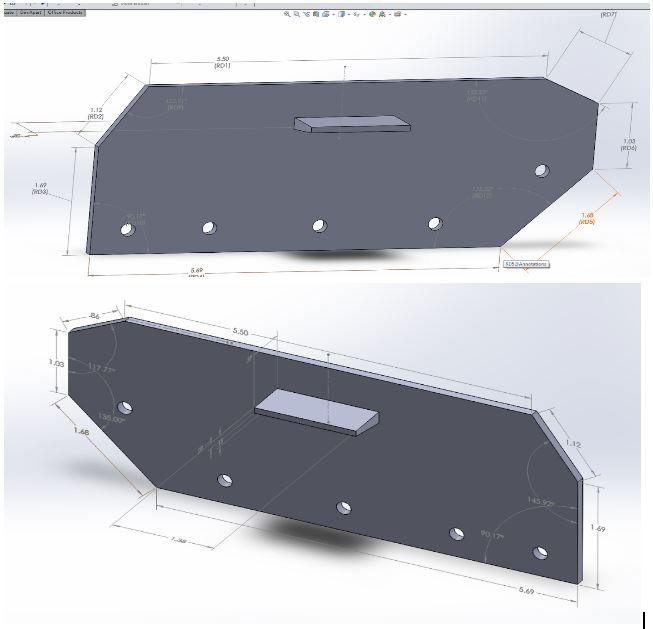
This does not meet level one requirement, so we must revert to Plan B: reducing the amount of components which make up our body from 6 to 3 components, sides (2), and cellphone and periscope compartment (1).
Here are the results:
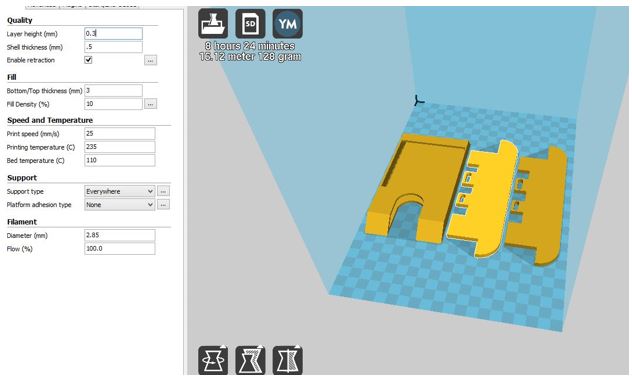
To my surprise, the printing time did not decrease!
I requested that Carlos increase the layer height to 0.4 mm which will decrease printing time and help our team meet the 6 hour printing time requirement. Here are the results:
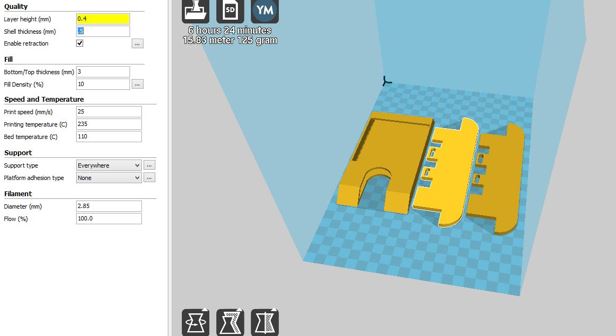
For 3 components, the total time still exceeds 6 hours. Therefore, I will go back to the drawing board readjust components thickness.
References:
1-Carlos Vergara, AESB Representative for Maker’s Society, E-mail: carloslbvergara@gmail.com
2- “What Is the Influence of Infill %, Layer Height and Infill Pattern on My 3D Prints?” 3D Matter. N.p., 10 Mar. 2015. Web. 23 Mar. 2016.