2016 Pathfinder
Solar Panel Subproject
Preliminary Design Documentation

Pathfinder – Solar Panel Team:
Inna Echual (Project Manager)
Stephan Khamis (Systems Engineer)
Jose Rodriguez (Electronics Engineer)
Ridwan Maassarani (Manufacturing Engineer)
Table of Contents
- 1 Project Manager Research
- 1.1 Task Description
- 1.2 Source Material
- 1.3 Review of Literature
- 1.4 Fall 2016 Discussion of Spring 2016 Level 1 Requirements
- 1.5 Fall 2016 Objectives
- 1.6 Fall 2016 Mission Profile
- 1.7 Fall 2016 New Level 1 Requirements
- 1.8 Fall 2016 Preliminary Budget
- 2 Systems Engineer Research
- 2.1 Source Material:
- 2.2 Additional Sources:
- 2.3 Review of Literature:
- 2.4 Summary of Level 2 Requirements: Spring 2016
- 2.5 Fall 2016 Level 2 Requirements
- 2.6 Fall 2016 System Block Diagram
- 2.7 Fall 2016 Product Breakdown Structure
- 3 Electronics and Control Research
- 3.1 Task Descriptions
- 3.2 Research Discussion
- 3.3 Source Material
- 3.4 Additional Sources:
- 3.5 Review of Literature:
- 3.6 Proposed Sub-Level 2 Requirements
- 3.7 Device Recommendations & Test Proposals
- 4 Design and Manufacturing Research Work
- 4.1 Task Description
- 4.2 Source Material
- 4.3 Additional Sources
- 4.4 Introduction
- 4.5 Problem
- 4.6 CubeSAT Spring Hinge Design
- 4.7 Geared Lifting System
- 4.8 Rapid Prototyping Design (RPD)
- 5 Creativity Exercise:
- 5.1 Problem Statements
- 5.2 Proposed Design Solutions
Project Manager Research
By: Inna Echual
Task Description
As project manager, I am responsible for the completion of the project, as well as ensuring that the customer’s requirements are met. In order to ensure the timely progression of the Fall 2016 Pathfinder, I did research on the previous Spring 2016 Pathfinder and identified any requirements they did not meet to prevent those mistakes happening to this project.
Source Material
- Spring 2016 Pathfinder: Project Summary, Resource Report. 5/15/2016. http://arxterra.com/spring-2016-pathfinder-project-summary/
- Spring 2016 Pathfinder: Project Summary, Project Video. 5/15/2016. http://arxterra.com/spring-2016-pathfinder-project-summary/
- Spring 2016 Pathfinder Preliminary Project Documentation. 2/19/2016. http://arxterra.com/spring-2016-pathfinder-preliminary-design-documentation/
- Spring 2016 Pathfinder: Mission Profile and Project Objective Update. 5/9/2016. http://arxterra.com/spring-2016-pathfinder-mission-profile-and-project-objective-update/
- Spring 2016 Pathfinder Solar Panel Implementation. 4/4/2016. http://arxterra.com/spring-2016-pathfinder-solar-panels-implementation/
- Spring 2016 AdBot Preliminary Design Documentation and Plan. 2/19/2016. http://arxterra.com/preliminary-2/
- Spring 2016 AdBot Final Project Documentation. 5/13/2016. http://arxterra.com/spring-2016-adbot-final-project-documentation-2/
Review of Literature
Analysis of Past Level 1 Requirements
Requirement Evaluation Rubric:
- Is the requirement, Quantitative, Verifiable, and Realizable?
- Is the requirement located at the correct level (1 – Program/Project)
- Is the requirement response to a higher level requirement or customer’s objective (Requirement Flow Down)? Is the linkage clearly defined?
- Does requirement provide links to source material?
- Does the requirement move the design process forward?
- Are equations used to calculate a requirement provided and are answers correct?
- The requirements that are missing are the hardest to discover and will be factored into your evaluation.
- Is language in the form of a requirement?
- Avoid multiple requirements within a paragraph. (i.e., breakup statements that contain multiple requirements)
| Past Level 1 Requirements | Requirement Rubric Evaluation Number | ||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| 1. The pathfinder project must be completed by May 2, 2016, the last day of EE 400D class (from the syllabus). | Y | Y | Y | Y | Y | N | – | Y | Y |
| 2. The cost of the project shall be limited to $325. | Y | Y | Y | Y | Y | Y | – | Y | Y |
| 3. The Project Final Documentation must be turned in by April 25th, 2016 (from the syllabus). | Y | Y | Y | Y | Y | N | – | Y | Y |
| 4. The pathfinder shall be able to explore CSULB at night. | Y | Y | Y | Y | Y | N | – | Y | Y |
| 5. The pathfinder shall have a camera so the customer can see what the rover sees. | Y | Y | Y | Y | Y | Y | – | Y | Y |
| 6. The path that the pathfinder will explore is where the best Wi-Fi connection is at CSULB. | Y | Y | Y | N | Y | N | – | Y | Y |
| 7. The pathfinder shall be self-sufficient using solar panels. | Y | Y | Y | Y | Y | Y | – | Y | Y |
| 8. The pathfinder shall be able to explore the campus for 4 hours at night and charge 8 hours during the day. | Y | Y | N | Y | Y | Y | – | Y | Y |
| 9. The pathfinder shall be faster than the curiosity rover (3 ft/sec) and slower than human walking speed (2 mph). | Y | Y | Y | Y | Y | Y | – | Y | Y |
| 10. The Google Tango tablet will be installed onto the rover so it can scan a max of 180 degrees left to right. | Y | Y | Y | N | Y | Y | – | Y | Y |
| 11. The Google Tango shall be able to scan and tell us the depth perception of an object at a maximum of 4 meters. | Y | Y | Y | N | Y | Y | – | Y | Y |
Fall 2016 Discussion of Spring 2016 Level 1 Requirements
The group wrote requirements that were located on the proper level and used appropriate language to establish said requirements. The group also ensured that the requirements were quantitative, verifiable, and realizable. Some requirements did not provide linkage to the source materials, like requirement #10 and #11. This is something to consider when developing our level 1 requirements to provide clear linkage. Another concern is that equations can’t be used to calculate some requirements, such as the ability for the Pathfinder to explore at night.
Fall 2016 New Objectives:
- The pathfinder shall be scaled to fit the dimensions of the cabinet.
- Pathfinder will have articulating solar panels that track the sun and enter/exit a cocoon state.
- The configuration of the solar panels will be identical to that of the Opportunity Mars Rover.
- Solar panels will be used to charge the batteries.
- Pathfinder should be able to explore the California State University, Long Beach campus.
Fall 2016 Project Objective Statement:
The objective for Fall 2016’s project is to imitate the design of NASA’s Opportunity Mar Rover to prototype a new generation of Pathfinder Rover that is self-sufficient using solar panels and implements the cocooning mechanism employed by the Opportunity Rover. The solar panels should be able to charge the battery for up to 8 hours during the day time for 4 hours at nighttime usage. The articulating solar panels of the Fall 2016 Pathfinder Rover is also designed to track the sun to maximize the amount of solar power received.
Fall 2016 Mission Profile:
Our pathfinder will be tested by completing the course defined by the Spring 2016 AdBot rover at night. This course is on the California State University, Long Beach campus, specifically in front of the University Student Union building.
Fall 2016 New Level 1 Requirements:
- The project involving the Pathfinder (Solar Panel subproject) shall be completed by December 14, 2016, which is the last day of this 400D course
- Pathfinder shall be able to travel the course as defined by the AdBot rover.
- Pathfinder shall be able to explore the course at an interval of 8 hours charging (during day time) and 4 hours run time (during the night).
- Pathfinder shall be self-sufficient using solar panels.
- Pathfinder shall have articulating solar panels that track the sun.
- Pathfinder shall have articulating solar panels that allow it to enter and exit a cocoon state.
- The form factor of the solar panels on the Pathfinder shall be identical to that of the Spirit and Opportunity rovers (Arxterra logo).
Fall 2016 Preliminary Budget:
The predicted cost of Spring 2016’s Pathfinder project was $300 ($150 on solar panels and $150 on other mechanical/electrical parts). Their actual total cost was $672.99:
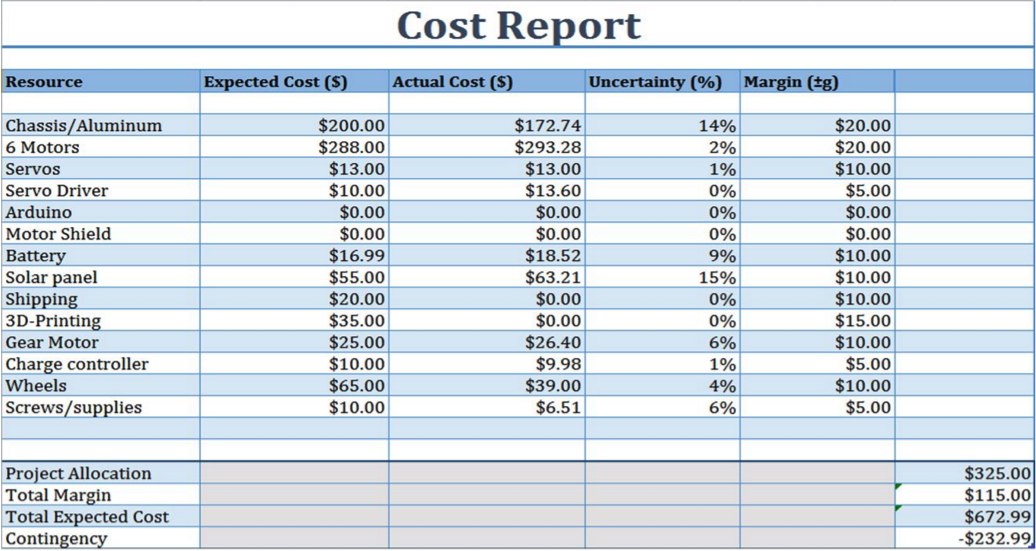
Based on the preliminary research we’ve done, we expect to spend $90 on solar cells work total ($65 on the solar cells and $25 on additional parts like the copper tabbing and resin encasement layer) and $25 on the aluminum sheet/panel framing. We expect to spend $70 on motors ($10 on three DC motors and $20 on two stepper motors) if we implement a sun-tracking system with two panels articulating. We plan to use 3D for our gears to implement our folding mechanism, which we expect will be $20, and $15 for other screws and supplies. Our predicted cost for the project is $220 We plan to use torsion hinges to implement the panel articulation, expecting a cost of $75 (for five hinges). Our total predicted cost is $295.
Systems Engineer Research
By: Stephan Khamis (Mission, Systems, & Testing
Task Descriptions
The system block diagram shows the interconnection between each component to successfully run the solar panels for the pathfinder. An Arduino Leonardo will be heavily used for the cocooning and sun tracking of the project. Along with the Arduino and cocooning process we will have a motor shield attachment that will help the motors move back and forth from its initial state. We then will have a battery that will store the power from the converted solar energy. Connected to the Arduino we will have a Bluetooth module to connect to our android and Arxterra app.
Source Material
- Spring 2016 Pathfinder: Project Summary. 5/15/2016. http://arxterra.com/spring-2016-pathfinder-project-summary/
- Spring 2016 Pathfinder: Project Summary, Preliminary Design Review. 5/15/2016. http://arxterra.com/spring-2016-pathfinder-project-summary/
- EE 400D F’16 Project Objectives and Mission Profile. 9/4/2016. http://web.csulb.edu/~hill/ee400d/F%2716%20Project%20Objectives%20and%20Mission%20Profile.pdf
Additional Sources
[4] 10 Pcs 125MM Sunpower Flexible Solar Cell 5×5 Maxeon C60 Grade A for DIY Photovoltaic Mono Solar Panel. https://www.aliexpress.com/item/10-Pcs-125MM-Sunpower-Flexible-Solar-Cell-5×5-Maxeon-C60-Grade-A-For-DIY-Photovoltaic-Mono/32679323815.html/
[5] R. Smith. (2009). How to Build a Solar Panel [Online]. Available: http://www.instructables.com/id/How-To-Build-A-Solar-Panel/
[6] 8 Good Reasons Why Moncrystalline Solar Panels are the Industry Standard. http://www.solar-facts-and-advice.com/monocrystalline.html
Review of Literature
- The “Spring 2016 Pathfinder Project Summary’ explains the Pathfinders entire routine of what has been done and how it has been done. This also includes the level 1 and 2 requirements for each step, as well as the project designs/cost summary/progress chart
- The “Spring 2016 Pathfinder PDR” is a document stating the route that the project will be taking to complete its task of creating a pathfinder.
- The “Fall 2016 Level 1 Requirements’ are a list of requirements that the customer has assigned for us. Within the pathfinder you will see multiple requirements but, since we are dealing with the Solar panel itself we will be wanting to satisfy requirements 1, 6, 7, and 8.
- The ‘Solar Cells’ link contains a website that we will be using to buy the solar cells to create our solar panel.
- The “How to build Solar Panel” link is a basic tutorial that guides you how to create a solar panel using a wood frame.
- The “Monocrystalline Silicon” link is an information link that gives you the advantages and disadvantages as to why monocrystalline is industry standard.
| Past Level 2 Requirements | Requirement Rubric Evaluation Number | ||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| 1a. Due to daylight savings, the sun will set around 7:00 pm and we shall have the pathfinder start exploring no earlier than 7:00 pm. | Y | Y | Y | N | Y | Y | – | Y | Y |
| 2a. Two headlights shall be installed onto the pathfinder to light up the surrounding up to 4 meters. | Y | Y | Y | N | Y | N | – | Y | Y |
| 3b. The maximum mass capacity of the rover shall be 7257.48 grams (16 lbs) to give us at least a height clearance of 2.54 cm (1 inch) from the ground to the chassis. | Y | Y | Y | N | N | Y | – | Y | Y |
| 4a. The batteries shall be chosen with the right specifications to give us at least4 hours of run time. | Y | Y | Y | N | Y | N | – | Y | x |
| 5a. The solar panel shall charge the batteries for 8 hours. | Y | Y | Y | N | Y | N | – | Y | Y |
| 5b. The solar panel shall be able to fit the dimensions of 15 inches by 10 inches (chassis dimensions). | Y | Y | Y | N | N | Y | – | Y | Y |
| 6b. The motors shall have to be able to handle at least 7257.48 grams (16 pounds). | Y | Y | Y | N | Y | Y | – | Y | Y |
| 7a. A pan and tilt system shall be installed onto the pathfinder to incase the Google Tango tablet and turn it 180 degrees. | Y | Y | Y | Y | Y | N | – | Y | Y |
| 7b. The servo shall be able to turn at least 180 degrees with a mass of at least 5 pounds (2.27kg). | Y | Y | Y | N | Y | Y | – | Y | Y |
Summary of Level 2 Requirements: Spring 2016
The requirements for the Pathfinder were detailed and specified but, heavily based upon the movement and protection of the chassis and Google Tango attachment (which is not being used this semester). Although they succeeded using the solar panel for its basic role (charging battery) they lacked specifying customization requirements for the solar panel which would be to represent the Arxterra logo.
Fall 2016: Level 2 Requirements
- The project involving the Pathfinder (Solar Panel subproject) shall be completed by December 14, 2016, which is the last day of this 400D course
- Pathfinder shall be able to travel the course as defined by the AdBot rover.
- Pathfinder shall travel 160 feet on concrete. This distance is the length of the test course counting inclines and stairs.
- Pathfinder shall travel up 9 or more steps. The stairs in front of the University Student Union building consists of 9 4.3″x16″ steps.
- The front of the University Student Union building consists of nine 4.3″x16″ steps. Pathfinder shall be able to travel up and down at this 15-degree incline.
- Pathfinder shall be able to explore the course at an interval of 8 hours charging (during day time) and 4 hours run time (during the night).
- The sun will set around 4:30 PM in December 2016 and we shall have the Pathfinder start exploring no earlier than 4:30 PM.
- Pathfinder shall be self-sufficient using solar panels.
- Pathfinder should be able 4 hours run time (during the night)
- The solar panel shall be able to charge the battery system for 8 hours.
- Pathfinder shall have articulating solar panels that track the sun.
- The panels shall have a motor with the right specifications and hinges that allows the panels to move to articulate with the sun.
- Pathfinder shall have articulating solar panels that allow it to enter and exit a cocoon state.
- The pathfinder shall use hinges that will be able to support the weight of the solar panels of at least 2 lbs.
- The form factor of the solar panels on the Pathfinder shall be identical to that of the Spirit and Opportunity rovers (Arxterra logo).
- The solar panel shall be able to fit the dimensions of the chassis (12 inches by 18 inches)
Fall 2016: System Block DiagramStructure

The system block diagram shows the interconnection between each component to successfully run the solar panels for the pathfinder. An Arduino Leonardo will be heavily used for the cocooning and sun tracking of the project. Along with the Arduino and cocooning process we will have a motor shield attachment that will help the motors move back and forth from its initial state. We then will have a battery that will store the power from the converted solar energy. Connected to the Arduino we will have a Bluetooth module to connect to our android and Arxterra app.
Fall 2016: Product Breakdown Structure

The above product breakdown structure (PBS) above states the main components used in our solar panel for the pathfinder. There are two main branches; hardware, and software, each showing the main components. To begin with the hardware, we have our aluminum panels that will be the base of the solar panel. We chose to use aluminum because it’s sturdy, lightweight, and conducts well. We then have our solar cells which is made of monocrystalline silicon, a material that has proven itself to be the leading choice for solar cells because of its efficiency when converting solar energy to power. Resin and tubing connectors will be used to attach the solar cells onto the aluminum panels. We will also be using two 7.4V 10A batteries to retain power that will be used for the mission. One of the main requirements besides having the pathfinder be self-sufficient, with the use of our solar panels, is to have our panels articulate with the sun. We will be using photo resistors to help the panels track the sun and gain the maximum possible solar energy. The next major requirement is to mimic the cocooning mechanism that the Opportunity Mars Rover does. To satisfy this requirement we will be using stepper motors along with torsion hinges that will cocoon the panels. For the software portion of the project, an Arduino Leonardo will be used to control the cocooning. We will also be using a motor shield to help with the compatibility of the Arduino and motors.
Electronics Engineer Research
By: Jose Rodriguez (Electronics and Control)
Sensors, Actuators, and Power
Task Descriptions
- Select Motors that will be used to perform task
- Gather torque calculation and information for picking the right Motors
- Research possible motor and pick best motors depending on studies
- Look for shield that could be used to control 5 Stepper Motors
- If possible, I will try to find out how to design shield for motors control so that budget cost can be lowered
- Trade of study between different shields
- Write code that will be used to control solar tracking system
- Test code with motors and adjust so that system is optimized
- Develop power system and protection circuit for battery
- Design Fritzing diagram
- Test breadboard prototype
- Test finished PCB
Research Discussion
I have been focusing on learning more about motors and understanding what specifications I need to look at to make the right choice for our project. The research I’ve done is also helping understanding how to construct and implement an entire solar panel system. Additionally, the research I’ve done on the tracking system led me to the conclusion that photon resistors should be used. An Arduino Mega was used for a majority of the projects. To save space and the use of extra materials, I will try to use the same Arduino Mega used by the other team that is designing the chassis. If servos are used to for the tracking system, then the Spring 2016 Pathfinder’s Adafruit microcontroller can be used.
Source Material
- Spring 2016 Pathfinder: Project Summary. 5/15/2016. http://arxterra.com/spring-2016-pathfinder-project-summary/
Additional Material
[2] B. Earl. Adafruit Motor Selection Guide [Online]. Available: https://learn.adafruit.com/adafruit-motor-selection-guide/types-of-motors
[3] Electronics Hub. (2016). Arduino Solar Tracker [Online]. Available: http://www.electronicshub.org/arduino-solar-tracker/
[4] DIY Solar Panel Help. http://www.freesunpower.com/
[5] M. Davis. (2013). How I Built an Electricity Producing Solar Panel [Online]. Available: http://www.mdpub.com/SolarPanel/
Review of Literature
- This blog post provides information the specifications of the motor and battery used, as well as the power consumptions, of the Spring 2016 Pathfinder. The pathfinder this semester may use some of the same components, so information on the motors and battery are found here can be useful for making preliminary calculations.
- This webpage provides information on the different types of motors one can use and their benefits depending on the job they’re used for. This is helpful for determining which motor would be the most efficient for fulfilling the folding mechanism for the cocooning solar panels. Additionally, different types of controlling systems are discussed for each type of motor, as well as the implementation process of the system.
- This webpage provides the process and code for implementing a solar tracking system on an Arduino. The design and background information can be useful for the sun-tracking feature on our pathfinder.
- This webpage provides information about all the possible components that could be used for building a solar panel, which is what we may have to do to accomplish having the panels configured like the Arxterra logo. It also details the construction and descriptions needed in a solar photovoltaic system. Not all components will be used because the system is for home installations but the webpage definitely helps with deciding what components our team should consider for our solar panel system.
- This webpage has a solar panel project that shows the entire design process for a solar panl installation at the poster’s home. It has everything from how he built his solar panels to the components needed. The design of a charge controller is also implemented, which is something that I am looking into understanding to prevent overcharging of the battery. It is a step-by-step blog, so I am capable of implemented certain designs of the system
Proposed Level 2 Sub-Requirements:
Servos:
- Servo must be able to tilt solar panel towards the sun;
- Servos need to rotate a minimum of 180 degrees
- Voltage for servos should be less than 6V outputs due to the limit of Servo Driver (PCA 9685)
Motors:
- Generate enough torque to rotate the solar panels in an upward direction for cocooning
- Motors should use less than 6 volts
Battery:
- Battery needs to be able to power system during course defined for spring 2016 AdBot
Solar Panel:
- Control the current direction
- Stop charging once batteries are fully charge
Device Recommendations & Test Proposals:
Servos:
- Test servos for tilting solar panels
- Test different codes to see which one is more efficient and accurate when controlling servos
Motors:
- Check motor amperage during cocooning state.
- See if it is possible to control motors to go to certain positions
Solar panel:
- Measure power output of custom solar panel during different weather
- Check the time require to charge battery
H-bridge
- circuit will be use to reverse current flow (L293D Chip) in order to be able to spin motor in opposite direction, checking to see if the h-bridge is working
Manufacturing Engineer Research
By: Ridwan Maassarani (Design and Manufacturing)
Task Description
As the Manufacturing Engineer, I am required to generate a 3D model of the system and animate the folding of the panels using Solidworks. As a level 1 requirement, the panels need to track the sun which means creating a controlled folding mechanism for the panels. Also, I am required to buy off-the-shelf parts such as the Torsion Spring hinges and motor. This means I have to do trade-off studies on the different types of hinges. Last semester, solar panels were bought and glued onto the pathfinder chassis. This time around panels are going to be custom designed to be able to cocoon like the Opportunity Mars Rover.
Source Material
- Spring 2016 Pathfinder: Project Summary. 5/15/2016. http://arxterra.com/spring-2016-pathfinder-project-summary/
Additional Sources
[2] Economical General Purpose Hinges. http://ddtechglobal.com/product/brand/kwikfit-brand
[3] SFTH. http://www.sugatsune.com/products/productdetails.cfm?catid=5&subcatid=8&productid=SFTH
[4] A. Reif, V. Hoang, and A. Kalman. (2012). Recent Advances in the Construction of Solar Arrays for CubeSats [Online]. Available: http://www.cubesatkit.com/docs/press/Pumpkin_CSDWLU_2010-2.pdf
[5] H. Baig. (2012). Integrated Design of Solar Panels Deployment Mechanism for a Three Unit Cubesat [Online]. Available: http://www.spaceops2012.org/proceedings/documents/id1292352-paper-004.pdf
[6] Steppor Motor Mounting Bracket. http://www.robotshop.com/en/stepper-motor-mounting-bracket-nema-23.html?gclid=Cj0KEQjwvIO_BRDt27qG3YX0w4wBEiQAsGu3eQxT5MyXP8fUiSxc_ZOi_nEFa9Ijx_zo4KhecrSiNe8aAmbg8P8HAQ
Introduction
The first Arxterra Pathfinder project built during Fall 2014 was outlined and implemented, the basic idea being it mirrored the Mars rovers in their construction and autonomous ability. The Spring 2016 Pathfinder made modifications to the original project with the inclusion of solar panels. Currently, our Fall 2016 group will make further modifications to the solar panel configurations through the redesign of the panels to resemble the Spirit and Opportunity rovers. This configuration will also include the panels to enter and exit a cocoon state. Our proposed design consists of a foldable solar panel scheme, instead of buying an off-the-shelf mechanism. In the Spring 2016 model, the solar panels were bought and glued onto the pathfinder chassis. Our group will work to have the panels designed to be able to cocoon like the Opportunity Mars Rover. Pathfinder will have articulating solar panels that track the sun and enter/exit a cocoon state.
Problem
A suitable controlled folding mechanism is not available in the market so a custom mechanism needs to be devised. As a requirement, the panels need to be able to fold into a cocooned state and be able to track the sun. The system must be able to handle the weight of the panels so proper torque calculations are needed.
Initially, an electrified hinge was proposed as our straw man model. This quickly became unfeasible since these hinges are made for heavy doors thus are power hungry.
After the creative exercise, it became clear that a custom solution was needed. From there came the idea of using a Torsion Spring hinge along with the custom motorized folding mechanism.
Torsion Spring Hinge
Torsion Spring Hinge to aid in lifting the panels in one direction. Potential energy is stored in a twisted spring. This will serve as a secondary pulling system that would fold the panels into a cocooned state. The figure below shows an example of how a Torsion Spring hinge would be utilized.
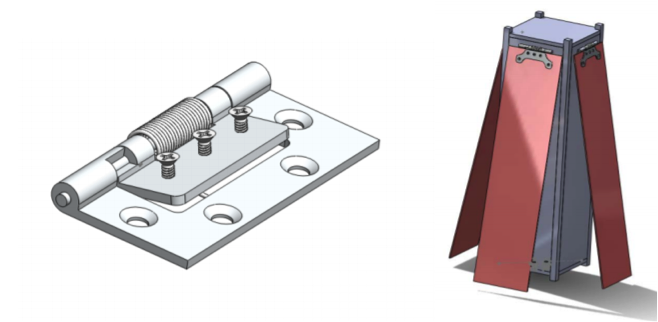
Figure 1: Torsion Springs
CubeSAT Spring Hinge Design
This shows how there has to be some height for when the panels close they would not touch. The pictures below show how some spacecraft have solved this issue. The hinges would have to have this feature or it would have to be custom designed.

Figure 2: CubeSAT Hinge
Geared lifting system:
Working alongside with the spring hinges there will be half a gear on one panel and a motor on the other side. This will produce the initial force required to lift the panels.

Figure 3: CubeSAT Hinge

Figure 4: Preliminary Design
Rapid Prototyping Design (RPD)
For rapid prototyping, we are going get some cardboard and some torsion springs. The cardboard will be cut depending on the panel sizes. We might 3D print the gears a test the lifting potential.
Creativity Exercise / Design Innovation
Problem Statements:
- The previous pathfinder fell backwards while going up an incline. The solar panels being heavy and bulky could have contributed to this this problem.
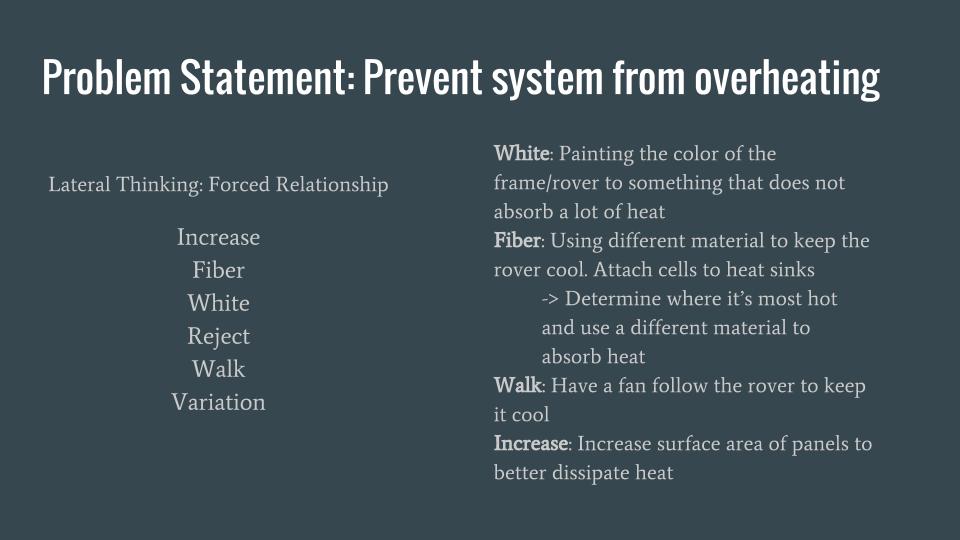
- Could the addition of customized solar panels result in overheating? How can we prevent our electronics from overheating?
- Accumulation of dust or unwanted material on the panels can affect its efficiency. Can we make the solar panels weatherproof?
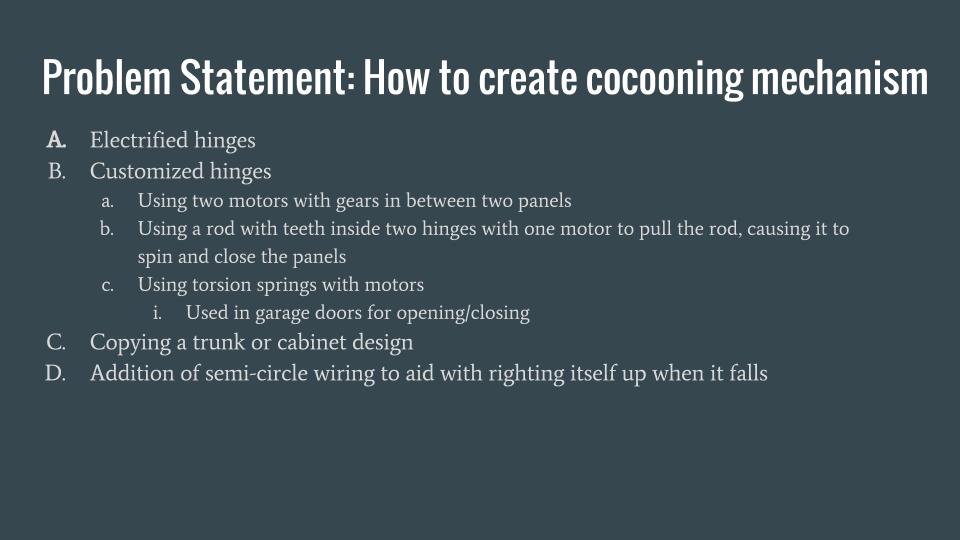
- The solar panels must be identical to that of the Opportunity rover, including its opening and closing mechanism. How can we accomplish this folding mechanism?
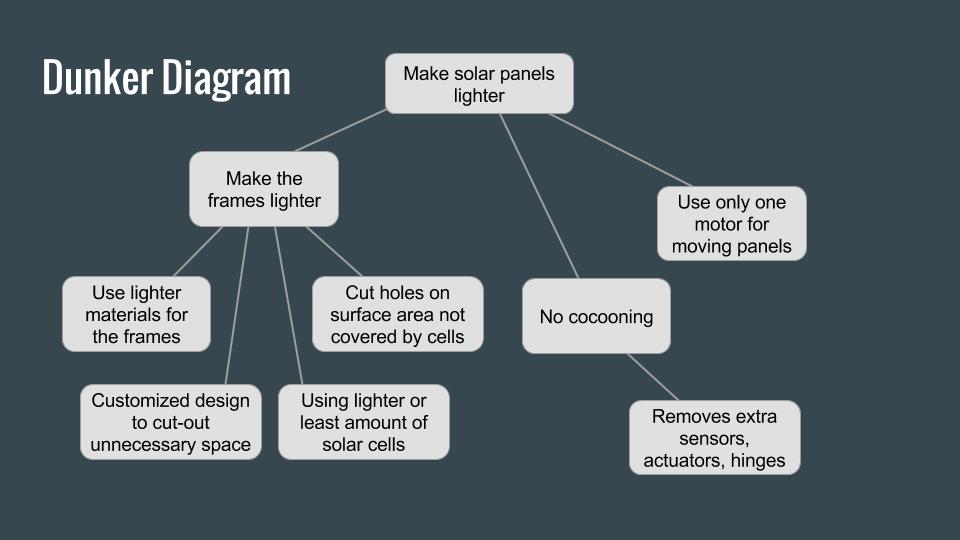

Proposed Design Solutions:
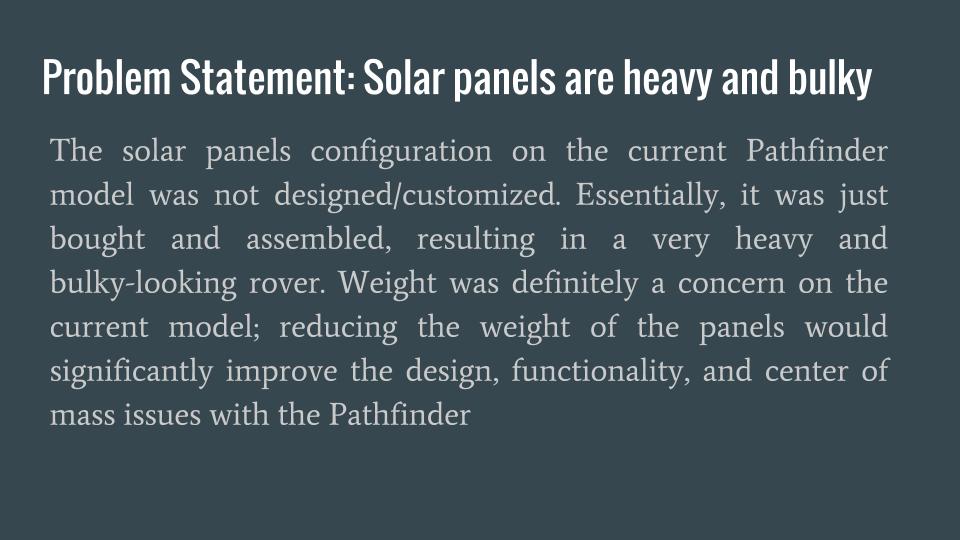
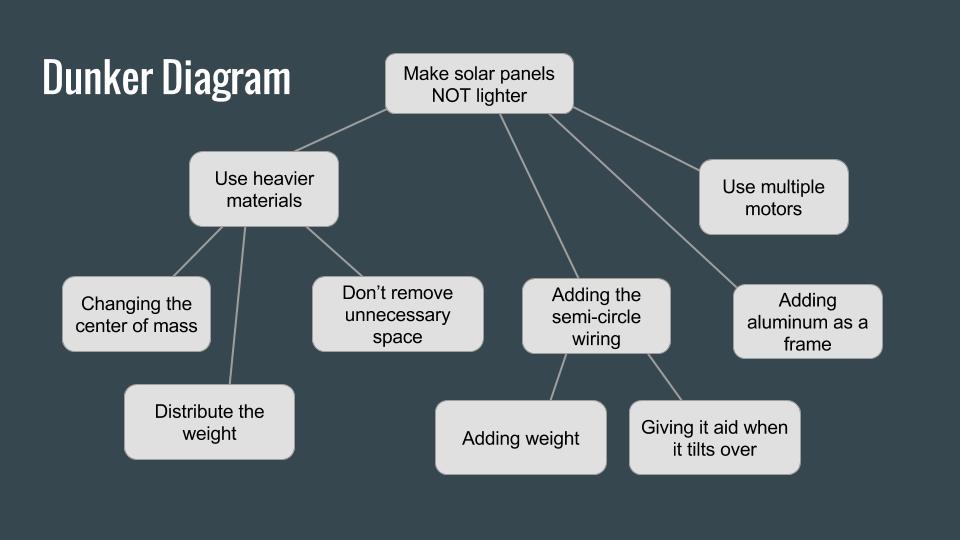
- Make solar panels lighter
- We are going to use the lightest possible material that is still durable to support the panels. The customized shape will also eliminate any excess surface area, reducing the weight.
- Prevent system from overheating
- We are considering using a heat sink or a fan to keep the system cool. Using lighter material will also help with this.
- Make the panels weatherproof
- We are going to use a water-repellant coating material on the cells.
- We are also considering covering each cell to roll dust off easily.
- Placing a vibrating motor onto the chassis to remove dust.
- Create cocooning mechanism
- Most likely, we will be using customized configuration using torsion hinges.