Interface Integration Piece
Blog Post – Integration Interface
Written by: Carolina Barrera
As mentioned multiple times in our documents, we scheduled integration for the arm for November 19th. No physical integration happened on this day. We didn’t assemble the two systems together, however we made some advancements in the process of integrating the components together.
An idea the two groups wanted to achieved initially, in which our system has a uniform forearm connected the bicep to the hand, and helps harmonize the appearance of the overall system was very desired. It seemed more promising for obtaining a better result in the validation for both teams, and it could lessen the weight that extra pieces (in the integration) add to the system.
Based on this approach, there were a couple of ideas that were considered before bringing up this idea:
- The dimensions for the wrist height and width are 3 in. by 3 in, respectively. Adding a cover would mean that our wrist would have a dimension of 3.5 inches at least.
- The weight of connector parts, and big screws in-between subsystems would be minimized if we tried.
- A harmonized structure would give more opportunities to both groups to increase points in their validation grade.
In November 19th, the idea of a one-solid piece helping as a shell mechanism, and unedifying both the forearm and the arm was brought up to consideration. The ideas described above served as reasons for implementing this instead of having the two independent components, as agreed originally. We measured the parts that we have at the moment, and figure the rough length of this new piece. Figure 1 is a picture we took on that day that could help as reference of the dimensions of this new part, and the functionality it would have.
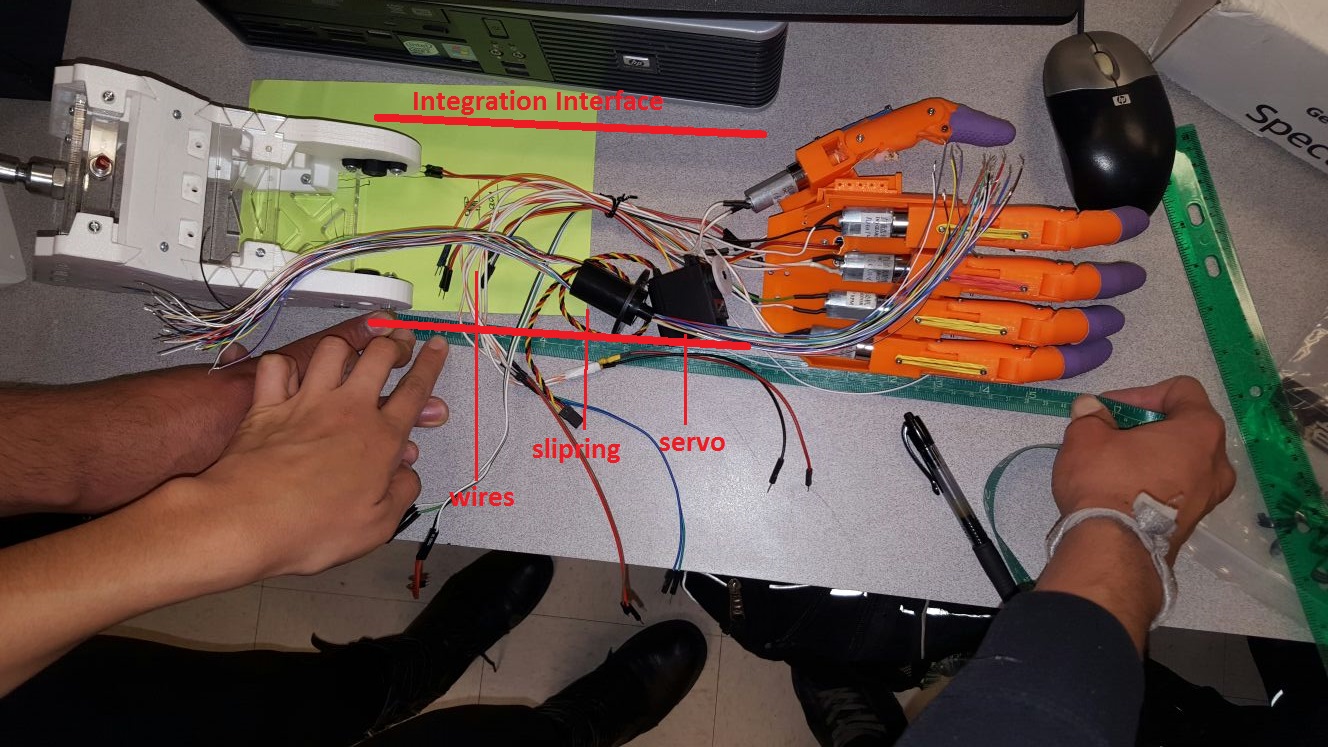
Figure 1 – Agreement Guideline Created on Nov. 19
To achieve this, the department of design offered their help, and the Junior TA, Van Lieu shepherd both Manufacturing Engineers in finding an aesthetic way to integrate their pieces. The resulting design is shown in figure 2.
In regards to the agreement, there are items that were communicated as clarifications:
- The hand and the arm agreed in the idea of implementing a solid interface for integration. This “integration part” that serves as a shell is result of the design and manufacturing efforts of both Manufacturing Engineers, Forrest Pino and Wilson Mach under guidance of Van Lieu, Industrial Design student from CSULB.
- This part will house the motor for the hand that allows the wrist rotation on the hand side. Additionally, it will house the wires going to the PCB of the hand -located near to the “elbow”, and a slipring -that will prevent over-twisting and ripping of the wires when the wrist rotates.
We moved forward in the process of integration -even though we were not physically putting together the components. This meeting could be considered the initial phase of the integration, in which the baseline is set, and both groups agreed in dimensions, and restrictions that will direct our project into mission success. More updates will be posted if relevant changes come up in the project. However, with the time left, and the advance stage of both projects don’t give space to last-minute changes.