Wheel Forces Calculations
By Anthony Dunigan
Back of the envelope calculations for wheels and electronic slip differential.
Table of Contents
Requirements
Level 2 Requirements
In order for the project to move forward in our Level 2 requirements numbers 8 and 9. We need to gather calculations based on our 6 in (0.0762m) wheel diamater.
Constants and Variables
r = radius (m), m = mass (kg), g = acceleration of gravity (m/s2), u = dynamic friction coefficient, uo = static coefficient, F = normal force(N), Fpw = normal force per wheel(N), FNet = net force or tangential force(N), Fstatic = static friction force(N), Fdynamic = dynamic friction force or when the wheel slips(N), T = torque(N*m), M = motor torque(N*m), Ff = friction force(N), I = current (Amps), V = voltage (Volts), Pout = Output power of motor (W), Pin = input power of motor;
Calculations
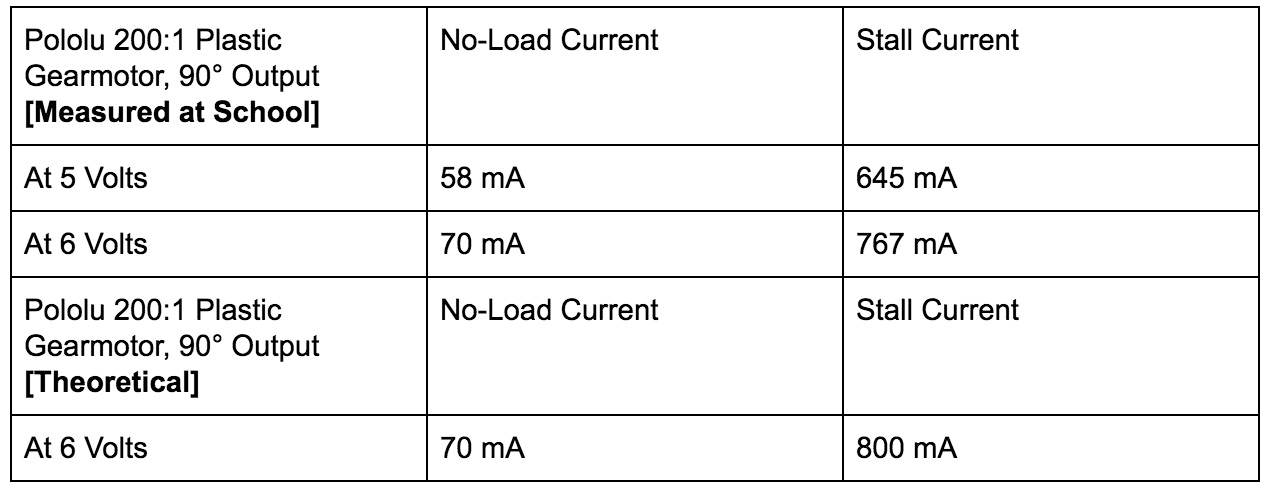
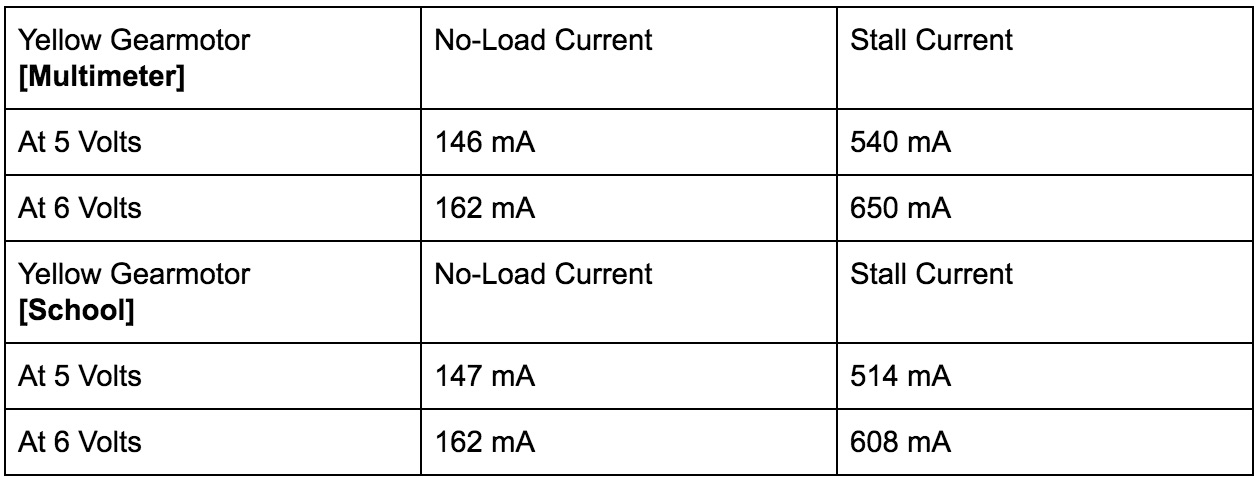
m = 22kg; g = 9.8 m/s2 ; u = 0.725 (rubber on concrete); uo = 1 to 4 or 2 (rubber on concrete); M = 0.339 N*m, I = 1.96 A, Pout = 9.3 W , at max efficiency; M = 1.13 when stalled.
F = m*g = 22kg *9.8 m/s2 = 215.6 Newtons (N), Fpw = F/6 = 35.93 N;
For the wheels to be balanced, static friction force must fulfill this inequations:
Fstatic ≤ uo * Fpw = (2) *35.933 N = 71.866 N;
If the static friction is unable to balance the system, then the static friction becomes dynamic friction and that’s when the wheel slips. The dynamic friction equation is:
Fdynamic = u * Fpw = 0.725 * 35.933 = 26.05 N;
For the wheel to avoid any slip, the friction force which is dependent upon the motor torque (M) should satisfy the equation below:
Ff = M/R ≤ uo * Fpw
Ff = 0.339 (N*m)/0.0762(m) = 4.45 N
So the force acting on the wheels must not be greater or equal to the friction force of the motor.
Sources
http://e-collection.library.ethz.ch/eserv/eth:8200/eth-8200-01.pdf
http://hypertextbook.com/facts/2006/MatthewMichaels.shtml
http://simplemotor.com/calculations/
http://www.tsinymotor.com/cn/Products/wolunjiansudianji/2014/0619/118.html