{kind=link}
Spring 2016 Pathfinder: Subsystem Design
By:
Juan Acosta (E&C – MCU Subsystem & Firmware)
Table of Contents
Fritzing Diagram
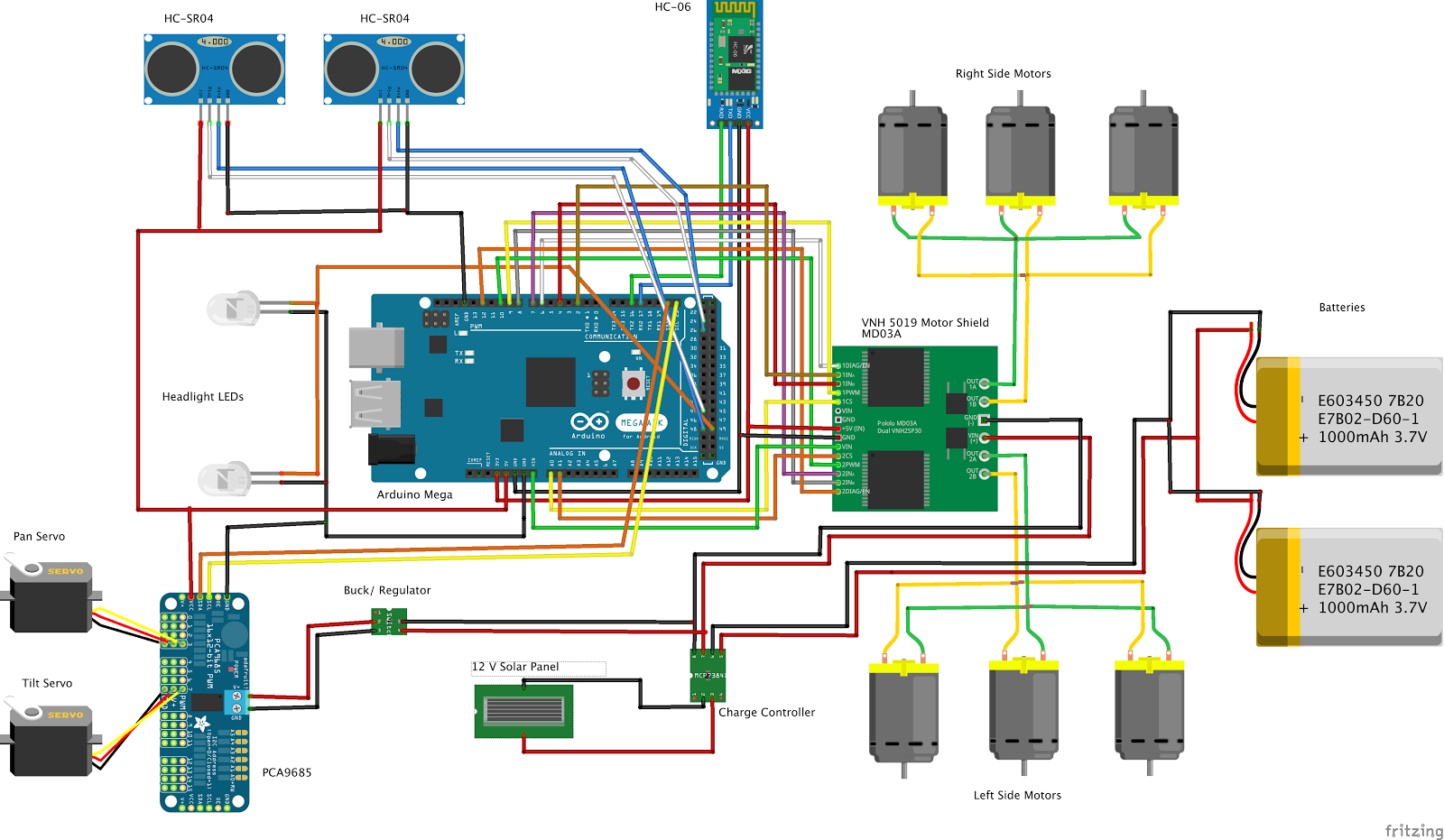
The fritzing schematic above depicts the circuit we used for testing the Wild Thumper Chassis’ motors, batteries, ultrasonic sensors, headlight L.E.D.s, servo driver along with servos, the motor shield along with the six motors driving the rover, and the Bluetooth module.
Earlier testing showed us that the Arduino Mega that we are using would leave us with plenty of unused pins, so we contemplated switching micro- controllers to the Arduino Uno. But after more experimentation we found the need for a servo driver to drive our pan and tilt system. We also found the need of digital pins to control the headlight L.E.D.s, communication pins for the Bluetooth module, and control pins for the ultrasonic sensors. Because of these needs, we determined that it would be best if we kept using the Arduino Mega.
As you can see from the fritzing diagram, the VHN5019 motor shield utilizes a little more than half of the Mega’s pins in order to drive the motors. So we decided to make another custom PCB shield that would serve to drive the HC-06 Bluetooth Module, the HCSR-04 ultrasonic sensors, the L.E.D. headlights, and the PCA9685 servo driver.
Breadboard:
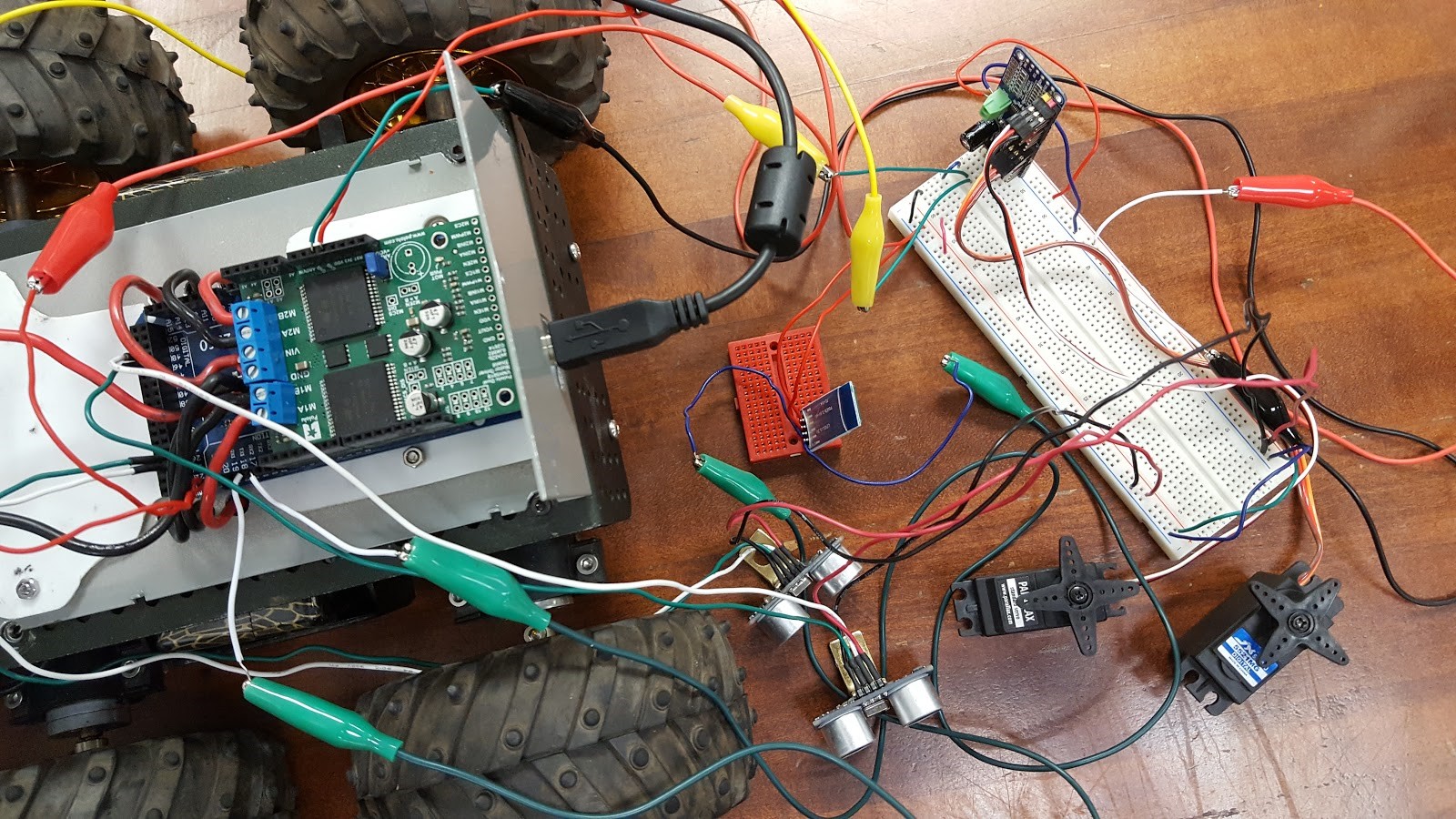
The photo above depicts the circuit we used for testing the ultrasonic sensors, the servos, the Bluetooth module, the motor shield, and the servo driver.
Charging Circuit:
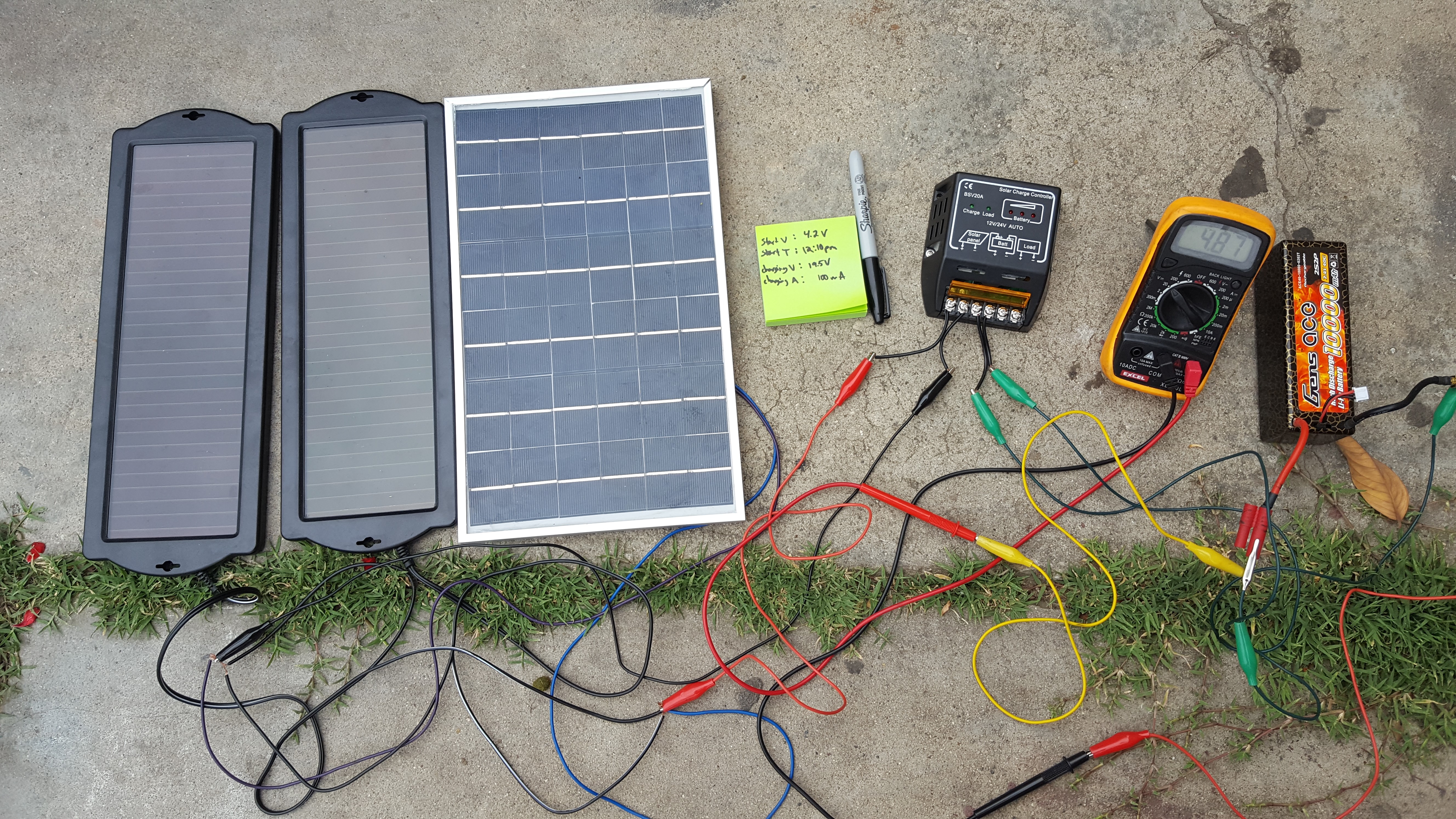
For our charge control circuit, we chose to use the Black Menba 20A 12V/24V Solar Charge/ Panel Battery Controller. We chose this solar charge controller because our initial charge controller design proved to be inoperable after thorough testing.
For initial design, reference previous blog post Spring 2016 Pathfinder Charging Control Circuit
Check more on blog post Spring 2016 Pathfinder Solar Panels Implementation
Led Headlights:
For our L.E.D. headlights, we chose to use the 6 Piranha 5V Led Light Panel Board. For this decision, we had only two factors: price and brightness. These L.E.D.s proved to be very bright meeting our expectations and making sure we met one of our requirements of aiding the pathfinder with lighting.
For more information see blog post Spring 2016 Pathfinder: LED Headlights
Source Materials:
– 6 Piranha 5V Led Light Panel Board White Night Lights Lamp Super Bright:
http://www.ebay.com/itm/181941929073?_trksid=p2057872.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT
– Black Menba 20A 12V/24V Solar Charge/ Panel Battery Controller:
– SMAKN® 16 Channel PWM/Servo Driver IIC interface-PCA9685 for arduino or Raspberry pi shield module servo shield:
– Spring 2016 Pathfinder: LED Headlights
http://arxterra.com/spring-2016-pathfinder-led-headlights/
– Spring 2016 Pathfinder Charging Control Circuit
http://arxterra.com/spring-2016-pathfinder-charging-control-circuit/