{kind=link}
Pick and Place – Servo Driver
By: Kevin Ruelas (Electronics)
The system block diagram presented in the PDR is undergoing changes, especially regarding the additional servos. The system block diagram that was made currently has two micro controllers connected via I2C. Both utilize the Me UNO shield and one port could generally house two servos.
Using a 12-bit PWM/Servo Driver we can hook up all twelve of our servos utilizing just one Ethernet port on the existing Me UNO shield. It would still require an RJ25 adapter in order to make all the right connections.

Figure 1. PWM Servo Driver via adafruit
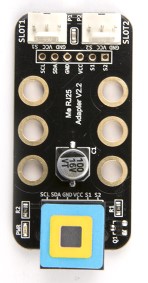
Figure 2. Makeblock RJ25 Adapter via Makeblock
A general Ethernet port for the Me UNO shield consists of two digital/analog pins, 5V, GND, SDA and SCL for I2C. For the driver, the 5V (Vcc), GND, SDA, and SCL pins will be used. The 5V (Vcc) from the Arduino is power for the driver, not the servos. So in order to make sure that there is enough power for the servos, an additional battery pack shown in Figure 3 will be required.
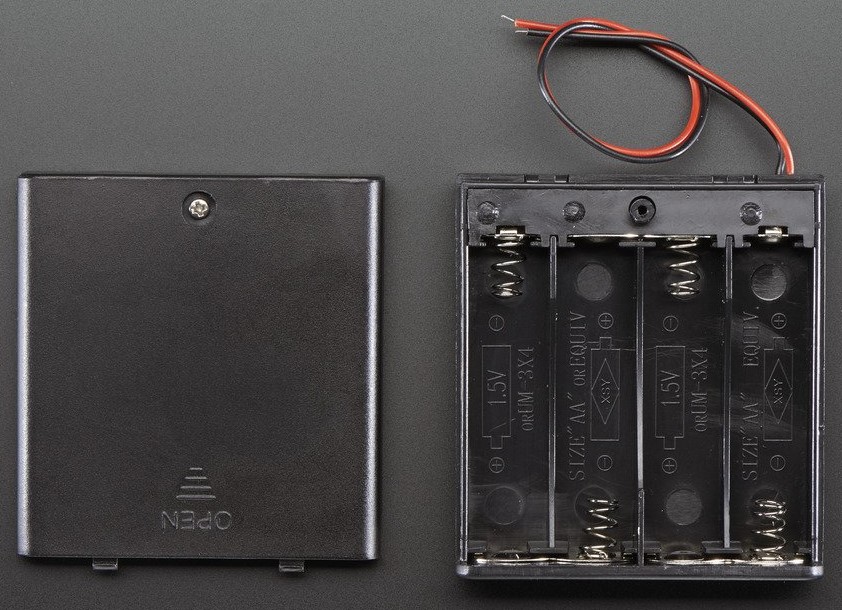
Figure 3. 4 AA Battery Pack via adafruit

Figure 4. Block Diagram for the servos
Using this driver would get rid of the Master-Slave micro controller combo and will also enable us to dedicate the second Arduino for an independent camera system. The main Arduino would house all the motors, limit switches, servos, solenoid valve, as well as the new LCD.
References
https://www.adafruit.com/product/815 (Servo Driver)
https://www.adafruit.com/products/830 (Battery Holder)
http://www.makeblock.com/me-rj25-adapter (RJ25 Adapter)