{kind=link}
2016 Fall Velociraptor: Preliminary Project Plan
Paul Ahumada – Project Manager
Robert Licari – Systems Engineer
Kevin Armentrout – Electronics and Control Engineer
Victoria Osaji – Manufacturing Engineer
Table of Contents
Work Breakdown Structure
By Paul Ahumada
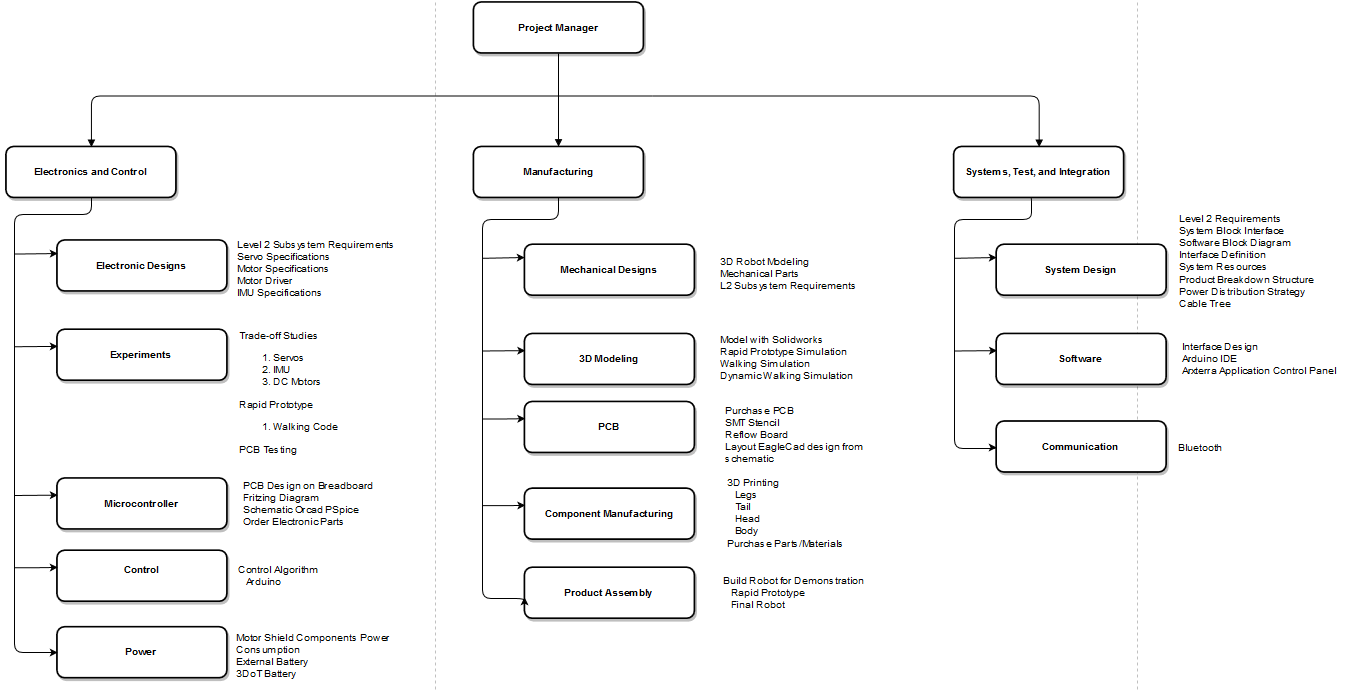
The WBS represents the job description tasks that members must fulfill. The three engineers are separated into their own divisions and handle their task for the Velociraptor. The tasks throughout the semester are specifically shown in the calendar view in the Top Level Schedule section.
Project Schedule
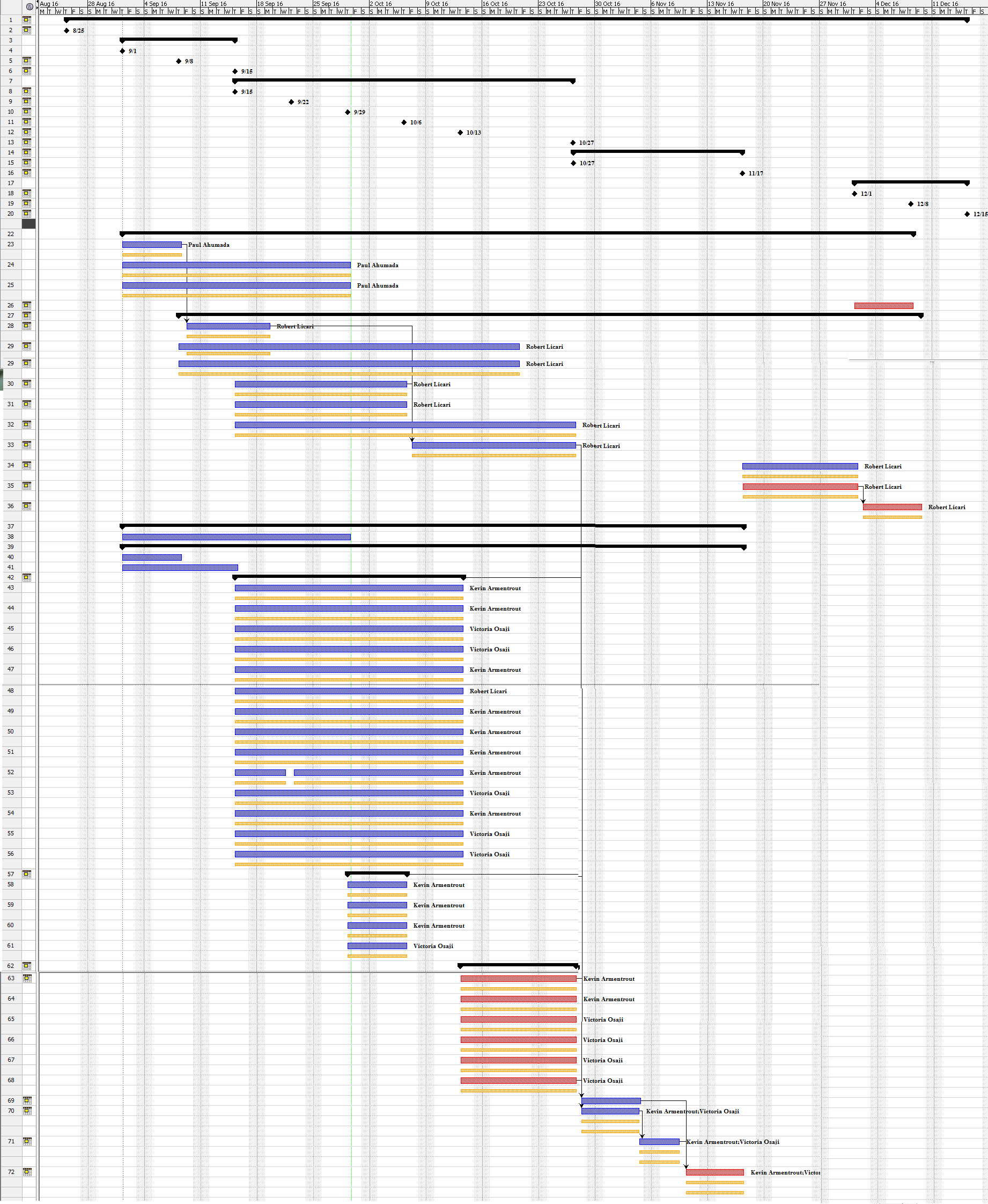
Top Level Schedule
By Paul Ahumada
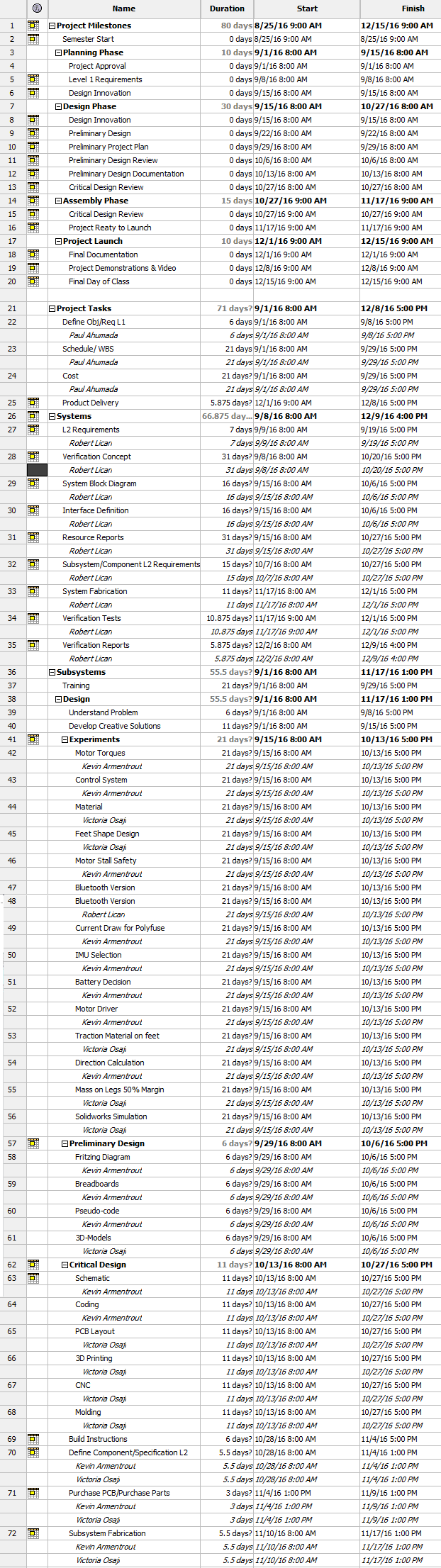
The schedule is spread out for the semester with start and due dates for each task. These dates refer to a schedule provided by the customer. The Velociraptor project should follow the schedule to remain on track. Experiments and tests may be added as they are discovered and increase the task load.
The calendar provides a visual with names associated with each task. The person assigned to that task is responsible for its completion.
{kind=link}
System/Subsystem Level Tasks
By Paul Ahumada
These tasks are shown in the Top Level Schedule. On the calendar layout, names are associated with each task. These tasks must be fulfilled by their associated team members. If there are no members listed, then the team as a whole must complete the task.
Burn Down and Project Percent Completion
By Paul Ahumada
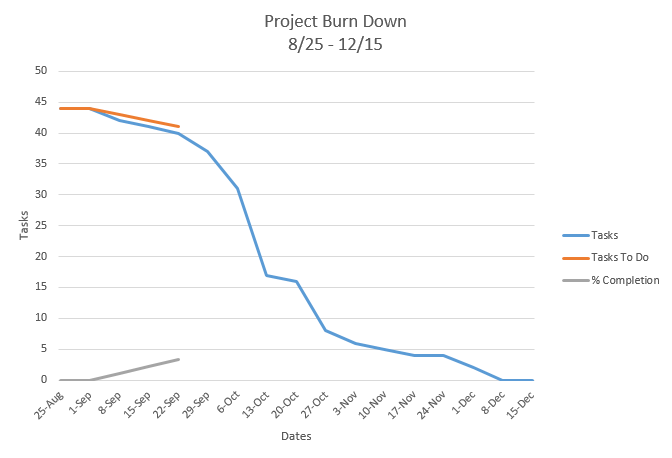
The Project Burn Down shows how many tasks are left that the Velociraptor group must complete by the last day of the semester. The tasks we compare to are the remaining tasks in the Top Level Schedule. These tasks may increase as new experiments and tests are discovered. The Percent Completion is on a scale of 0-50 so it can be included on the same graph of tasks remaining.
System Resource Reports
By: Robert Licari
Mass Report
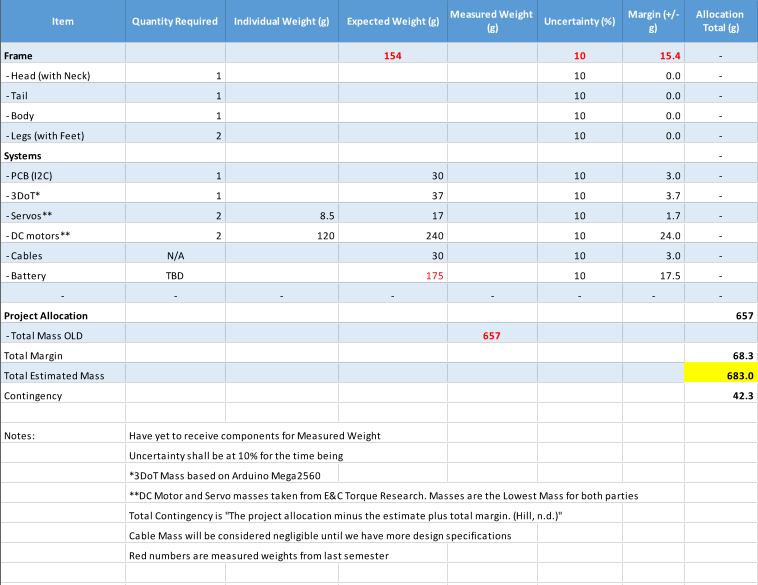
The mass needs to be as close to 657g as possible to meet initial torque calculations (done by E&C). Currently the estimated mass is at 706g with a contingency of 21.6. Assets that were used in this calculation come from the previous semester as well as the initial torque calculations. From the previous semester, we have our mass allotment of 657g as well as an overall frame mass of 154g. For our purposes, the frame mass shall be the total mass of the mechanical structure of the velociraptor without anything listed under the “Systems” category. Systems includes anything that will contain our control modules, battery packs, and any cables outside of the 3DoT board and the PCB motor controller. The battery mass was taken from last semester as a placeholder. We should expect the battery to be of equivalent or less mass than last semester. An allotment of 60g divided between the cables and the Motor Controller PCB have also been given as placeholders and will most likely alter based upon final design choices. Due to the nature of the design changes, this is only a preliminary mass resource report and is subject to change.
Power Report
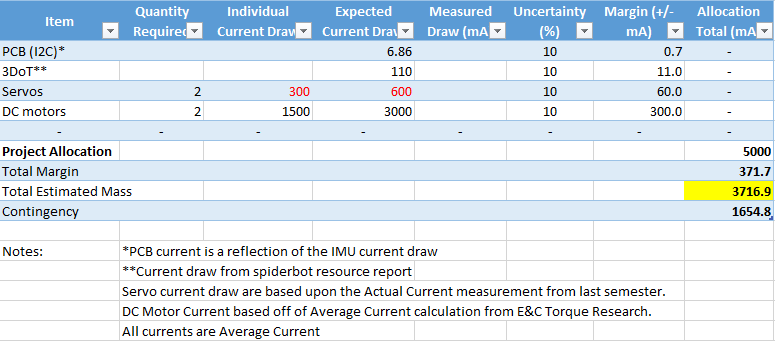
The power resource comes from four basic factors that draw current from our supply source. Supply source will be defined as the battery on the 3DoT board as well as an external battery source. The 3DoT board will consist of the Atmega32U4 microcontroller, the HC-10 Bluetooth module, as well as the boost converter and was estimated at 110mA average by spiderbot. The motors will be separated into the server motors and the DC motors. Current draw from the servos was taken from the “Actual Current” measurement from last semester, and the draw of the DC Motors was taken from the average current draw from the initial torque calculations. The PCB design has changed, so the current draw is minimal due to last-minute design changes. Due to the nature of the design changes, this is only a preliminary power resource report and is subject to change.
Project Cost Estimate
By Paul Ahumada

The Cost Report provides an estimate to what the expected costs will be. The previous semester had there project cost $257.48. There project had $443.76 allocated for the frame and had an actual cost of $5.00. There reports show that the robot was not made 100% of aluminum and used a combination of aluminum and PLA to reduce costs described by their mass reports. The cost report shown for 3rd generation shows an expected cost of $273.55 and is increased because of the margin. Previous semesters requested $400.00 and our increased margin brings us to $387.05. Numerous components were looked at and are included in the citations.
Citations:
- http://web.csulb.edu/~hill/ee400d/Lectures/Week%2005%20Project%20Plans%20and%20Reports/c_Generic%20Schedule.pdf
- https://www.servocity.com/hs-5065mg
- https://www.servocity.com/hs-65hb-servo
- https://www.servocity.com/hs-65mg-servo
- http://www.ebay.com/itm/Torque-Digital-Metal-Gear-Servo-Motor-for-RC-Robot-Helicopter-Airplane-Car-Boat-/222246871400?var=&hash=item33bef22168:m:mq1v5yVeOUDRTVVJUVjh70A
- http://www.ebay.com/itm/AE-Team-Associated-1-10-ProSC-ProLite-4×4-XP-DIGITAL-DS1903MG-STEERING-SERVO-/400948939305?hash=item5d5a6b4a29:g:j1MAAOSw0UdXqeLU
- http://www.robotshop.com/en/hitec-hs422-servo-motor.html
- https://www.arxterra.com/fall-2016-velociraptor-th-preliminary-design-document/
- https://www.google.com/search?q=pla+material&ie=utf-8&oe=utf-8#q=pla+material&tbm=shop&spd=8876641036563277883
- https://www.google.com/search?q=pla+material&ie=utf-8&oe=utf-8#q=pla+material&tbm=shop&spd=8876641036563277883
- http://www.homedepot.com/p/MD-Building-Products-24-in-x-36-in-Plain-Aluminum-Sheet-in-Silver-57794/202091743
- https://www.servocity.com/81-rpm-mini-econ-gear-motor
- https://www.servocity.com/90-rpm-micro-gear-motor-w-encoder
- https://www.servocity.com/90-rpm-micro-gear-motor
- http://www.batteryspace.com/A123-System-Nanophosphate-LiFePO4-18650-Rechargeable-Cell-3.2V-1100mAh.aspx
- http://www.batteryspace.com/smart-charger-3-0a-for-3-2v-lifepo4-battery-pack.aspx
- http://www.all-battery.com/TenergyLiFePO4BatteryCharger-01369.aspx?utm_source=GoogleShopping&utm_medium=GDF&gdffi=fb520bc42d4e46cbab702234d35f7d38&gdfms=58521D8DE97640DEAF38BED2760D36D6&gclid=CjwKEAjwjqO_BRDribyJpc_mzHgSJABdnsFW5P8tGT10YF5GFBHJeBKOgnXMOOc1RIUaGDwV8nozwhoCQvjw_wcB