Wi-Fi Range Extender
By Chau To
Introduction:
Wi-Fi extender or Wi-Fi booster is a device that picks up a wireless signal and then rebroadcasts that signal. It acts as a second access point for other devices to connect to. The range of a typical Wi-Fi extender is around 300ft. Some expensive Wi-Fi boosters can achieve a range of around 450ft.
Pros and Cons:
Pros:
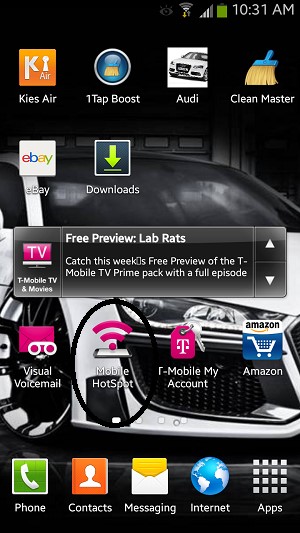
1. The Wi-Fi extender can be a solution to solve the Wi-Fi problem at the testing point. It can be used as a second access point between the building and the test place.
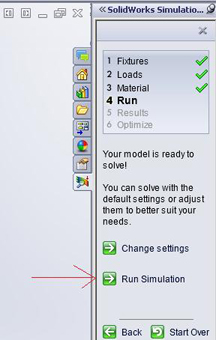
2. It is very easy to set up. There are 3 steps to set up a Wi-Fi extender. First, connect to the laptop via DSL cable. Second, launch the set-up GUI. Third choose the wi-fi signal to extend.
3. It is easy to find: Fry’s, Best Buy, online etc.
4. Quality and cost can be reviewed at this website:
http://wi-fi-booster-review.toptenreviews.com/
Cons:
1. The Wi-Fi extender always experiences 20%-50% throughput loss (the data rate loss) because it has to receive and then transmit data. As a result, the efficiency of the Wi-Fi extender is not that good. The amount of data used by Arterxa is very large because of the camera video streaming, so the efficiency of the Wi-Fi extender would affect the performance of the robot.
2. Wi-Fi extender is not very reliable. The connection is very bad especially for outdoor because of interference.
3. High-quality Wi-Fi extender can be expensive.
Testing:
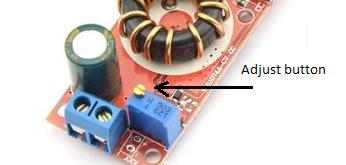
Use the Diamond WR300NR Wi-Fi Extender (in the figure) to see if it can solve the Wi-Fi problem. At the test site, we experienced many problems:
1. The Wi-Fi extender used the school’s Wi-Fi signal beachnet+ and boost that signal over the parking to the test site. The best place to place the Wi-Fi extender is around 50ft outside of the building so that it could performed at max efficiency. However, the test site and the building is 500ft apart, the Wi-Fi extender couldn’t boost the Wi-Fi signal to the test area.
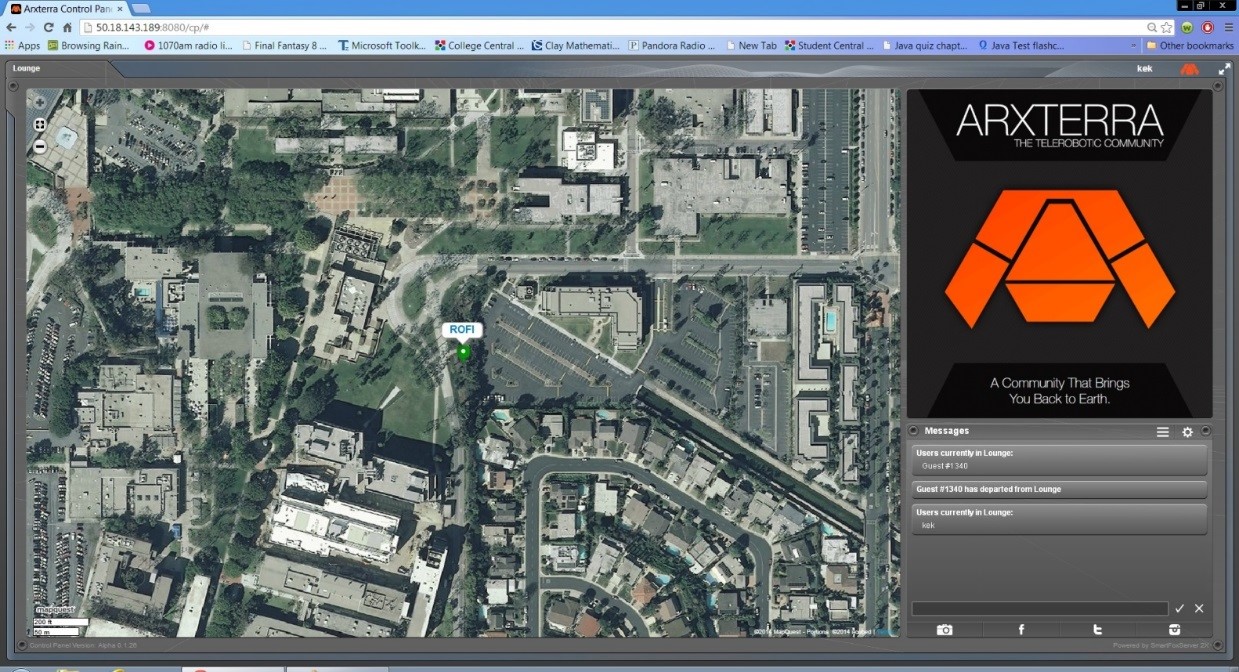
2. Interference is another major problem. Although the smart phone we used to connect to Wi-Fi was in the range covered by the Wi-Fi extender, the speed was very slow. And it lost connection all the time.
3. Power could be a problem because the Wi-Fi extender connected to 120V AC power from the wall, so we had to use a long cable to connect from the building to the parking lot.
Conclusion:
The Wi-Fi extender is not a good solution for the WIFI problem because of the range and the outdoor interference. A better quality and more expensive