


Written by Melwin Pakpahan (Missions, Systems, & Test)
This post will cover the assembly of the HM-11 Bluetooth module onto the 3DoT board. This module allows Bluetooth communication between the Arxterra app on an Android phone and the 3DoT board.
According to the 3DoT v5.03 schematic, the functional pins of the HM-11 module used for the 3DoT Board are:
Figure One shows the schematic of the HM-11 module taken from the 3DoT v5.03 schematic.

Figure One – Schematic of HM-11 module
Assembly of the component is as follows:
Finished assembly is shown in Figure Two.
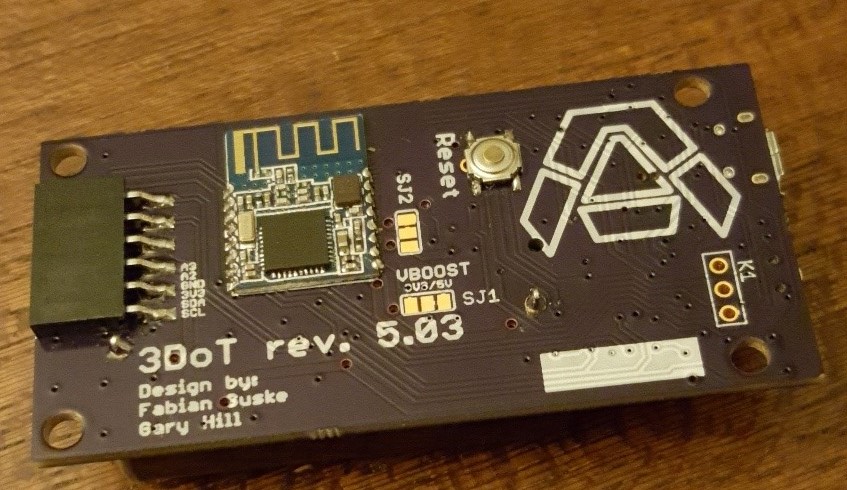
Figure Two – Finished Assembly
Pins 2, 4, 9, and 12 are the functional pins that must be soldered on to the board. In our case, all the pins are soldered onto the board to better hold the module in its place. However, this is not recommended because it makes the board more difficult to remove should there be any discrepancies. Therefore, only power (pin 9), ground (pin 12), transmit (pin 2), and receive (pin 4) should be soldered.
[1] HM-11 – Reference One
[2] 3DoT v5.03 Schematic – Reference Two
[3] Drag-soldering – Reference Three

Approved By: Muhannad Al Mohamed, Charles Banuelos, Melwin Pakpahan
Written By: Muhannad Al Mohamed
Table of Contents
The parts used in the fabrication of each color sensor shields are the printed circuit board, electronic parts(two color sensors (BH1745NUC-E2), two LEDs (0603 package), two 150 Ohms resistors (0603 package), one 10k resistor (0603 package), one 47k resistor (0603 package), two 0.1 uF capacitors (0603 package), one MOSFET, one pin header), and Color Sensor Shield’s stencils along with solder.
The design of the Color Sensor Shield is done using the free EagleCAD software. The schematics file of the circuit is attached to this link. The Printed Circuit Board layout is attached to this link. To open files the EagleCAD software needs to be installed.
The fabrication of the CSS (Color Sensor Shield) is currently taking place in ET-111 room. The room is equipped with a microscope that can help in placing the parts on the shield. It also has an oven that can be used to melt the solder on the shield to hold the solder in place. Other useful amenities are available in the room such as a fridge to keep the solder cooled and ready to be used, and scissors and tape that can be used to hold the shield in one spot to place parts.
The fabrication process starts with holding the shield in one place and apply solder to it. Some unused PCBs are used to hold the shield in the center with duck tape applied to it.

Placing CSS in the centre of other PCBs to hold it
Solder is then placed on the board with a stencil on top of it using a card to evenly spread the solder. The microscope is then used to check if enough solder is applied to the PCB’s pads. Parts are then placed on the shield using tweezers to carefully put each part on the exact corresponding place.
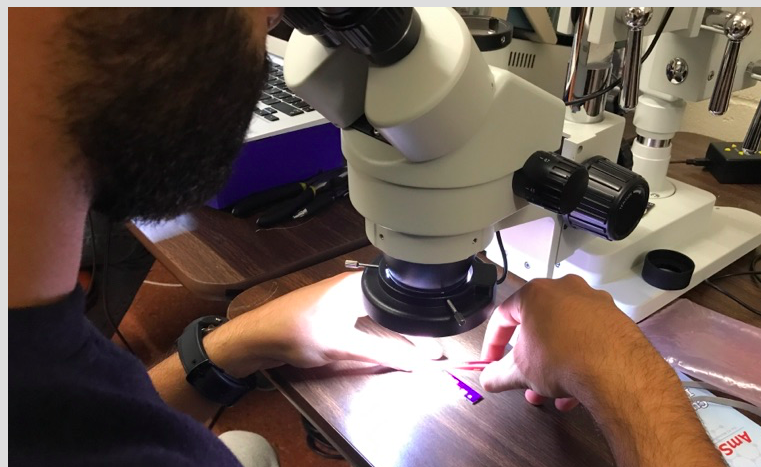
Placing parts using tweezers
Checking if parts placed correctly
After making sure that the parts are placed on the correct place by looking at the shield through the microscope, the shield is then placed in the oven to let the solder flow and melt to make the connection to the parts.
Cooking the CSS in the oven
Since the CSS has parts placed on the top and bottom of it, only one side, of the shield, parts will be placed on put in the oven. The other parts on the other side will be placed and soldered by hand.
Update: 12/6/2017
We were able to fabricate four shields with the parts provided.
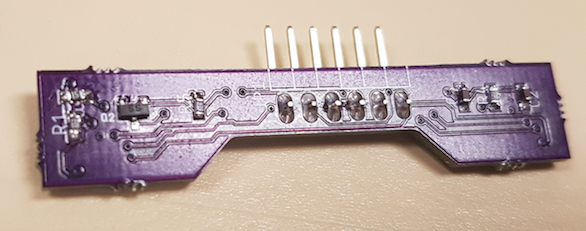
Color Sensor Shield Top View
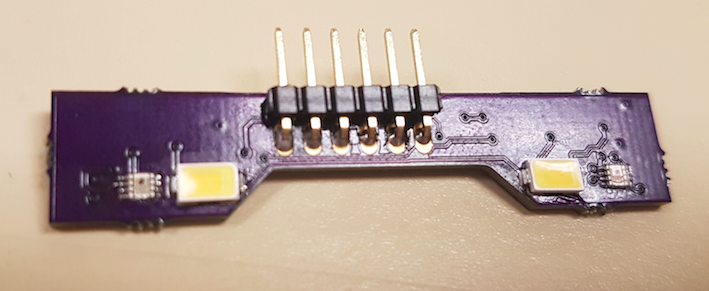
Color Sensor Shield Bottom View
The CSS will be tested once a fabrication of on shield is done. The shield will be connected to a 3DoT board and the I2C addresses would be checked. Codes of reading values within the registers in the Color Sensor IC should be applied to CSS through programming the 3DoT board.
The first test on the shields was an inspection to locate any bridges present on the surface mount pads or dislocation of parts. If any bridges or dislocation are present, the shields would be fixed by desoldering the parts with a heat gun and soldering them again in place. By visual testing, we found that two shields had their LEDs light on and the other two were not functioning. Therefore, pin testing was done to check if the LEDs and the Color Sensor ICs had power in them. Surprisingly all the pins had power in them, therefore, any misfunctions could not be seen visually.
After checking that all parts are in place, the address checking code is applied to the Color Sensor Shield to make sure that the two sensors have the addresses of (0x38) and (0x39).
Another testing method to see if the Color Sensor Shields are actually working is by applying an Arduino code that uses the I2C library to read data from a register within the Color Sensor IC. The code attached reads data from the register that holds the value of the Red color.
Reading data from a register on the Color Sensor
This code was unable to read data from the Color Sensor Shield so another code is used. This code is optimized to measure colors from the color sensor shield.
The measurements taken was applied by using a green surface with different locations.
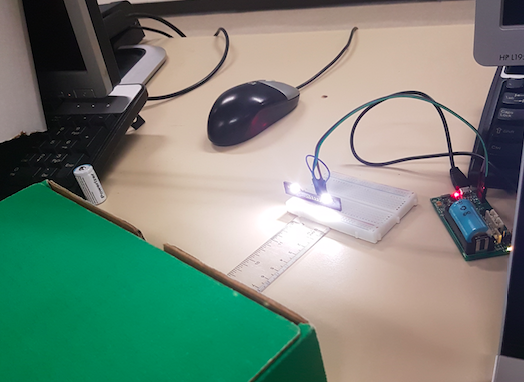
Taking measurements of the color sensor shield
Perpendicular alignment of the measured surface to the color sensor shield
Horizontal alignment of the measured surface to the color sensor shield
After taking measurements, we have concluded that the furthest distance for the color sensor to sense colors are 2cm perpendicularly and 0.5cm horizontally.
After testing all Color Sensor Shields (CSS), there were no functional shields that can be accurately used to take measurements of colors in the maze. Two of the shields did not have a functional LEDs due to the burning of some parts during fabrication. The other two boards had functional LED but only one color sensor on one board was functional. The other color sensor on that board was intermittent and could not be relied upon for accurate measurements.
The possible reasons for the failure of producing functional Color Sensor Shields are solder bridges created during the soldering process and burnt parts during the repair process. The bridges could have been created during the placement of the parts on the board which was done by hand instead of using the pick and place machine or during the baking process to solder the parts to the board. The burning of extra parts occurred during the repair of certain parts that did not solder to the board. A heat gun had to be used to repair the boards which would cause surface burns and ultimate destruction of parts.

By: Natalie Arevalo (Design & Manufacturing Engineer)
Approved by: Lucas Gutierrez (Project Manager)
Among the requirements set by the Robot Company, all projects must design and fabricate a custom PCB. However, due to the nature of our project and its design, a custom PCB is not necessary. In order to get the requirement of the custom PCB waived, the cable diagram for our project must be provided. The following is the cable diagram for our robot accompanied by a description. The description and diagram show that the components within our design can be directly connected into the 3Dot board without being interfaced through a custom PCB.
The electrical components implemented in our design include one 3DoT board, one generic color shield, two motors each with an encoder, one servo, and one proximity sensor. The majority of the components listed can be directly connected into the 3DoT board. For instance, the generic color shield will be directly connected into the color shield header on the bottom side of the board. Additionally, the servo used in the design is also directly connected into the male servo header on the 3DoT board. Furthermore, the SDA and SCL connections on the proximity sensor are directly connected into the SDA and SCL female connections on the board. Also, the A channel connections on both encoders are directly connected into the A0 and A1 female connectors on the 3DoT. Then, the M1 and M2 connections of both encoders are placed into the female connectors for motor drivers B and A on the board. The only connections placed indirectly into the 3DoT board are the ground and VCC connections for both of the encoders and the proximity sensor. These are placed into the 3.3 V and ground female connectors on the 3DoT board through some minor breadboarding. The two encoders on the motors, as well as the proximity sensor, have ground connections that are soldered in series on a through hole breadboard. A lead coming off of this breadboard, connected in series with the other ground connections, is then connected directly into the ground female connector on the 3DoT board. This set-up is then repeated for the 3.3 V connection on the proximity sensor and both VCC connections on the encoders. The lead coming off of their respective through hole breadboard is connected into the 3.3 V female connector on the 3DoT board. As shown below and detailed above, the majority of the connections needed for our components can be directly placed into the board. The only exceptions are the VCC and ground connections for the encoders and proximity sensors. This is resolved by soldering these connections in series on a through hole breadboard and then connecting a lead off of that directly into the respective female connectors on the 3DoT board. With this small design implementation, all components are eventually connected directly into the board thus eliminating the need for a custom PCB.
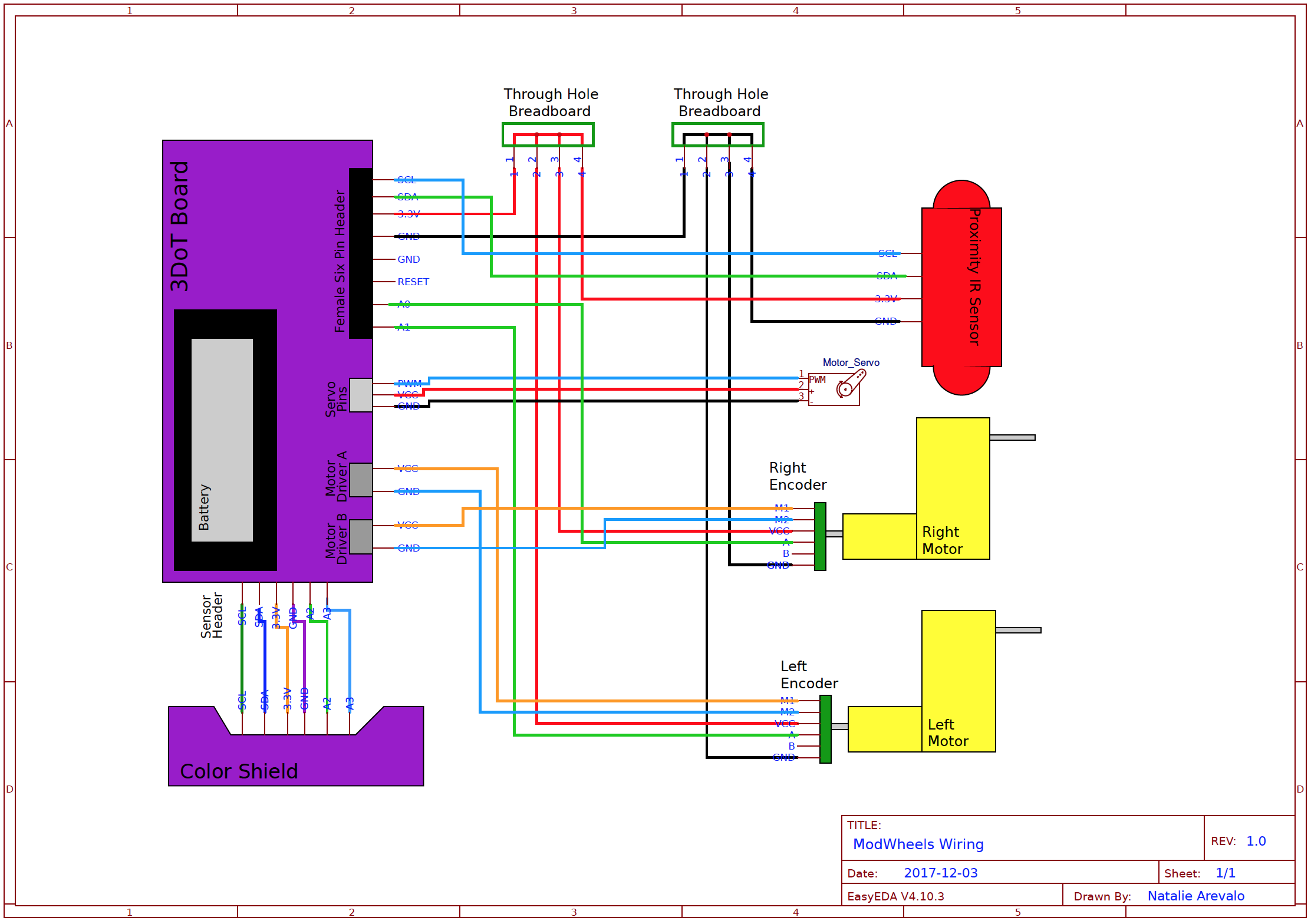
Figure 1: Cable Diagram
Due to unforeseen complications, 3DoT boards will not be available to be incorporated into our design. Instead, we will be executing the mission by incorporating break out boards that are connected on a breadboard. We will be using a ProMicro, a motor driver, as well as an HM 10 bluetooth module in place of the 3DoT board. We will also be using an IR shield instead of a color shield because there were complications with the fabrications of these as well. As a result, the cable diagram for our design has changed drastically. The new components and their incorporation onto the breadboard are shown in the updated cable diagram below.
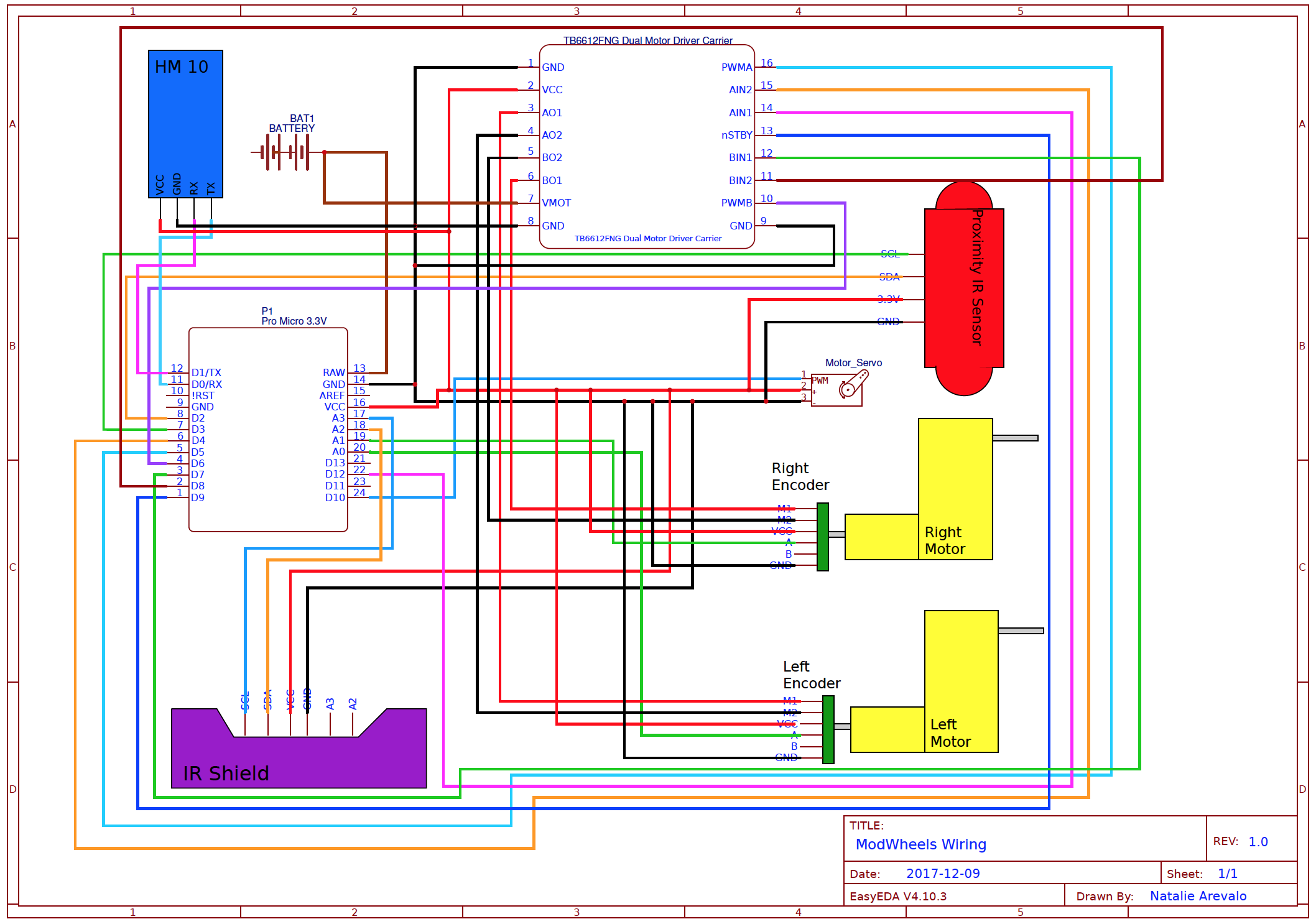
Figure 2: Updated Cable Diagram

By: Matt Shellhammer (Electronics & Control Engineer)
Approved by: Lucas Gutierrez (Project Manager)
Table of Contents
When in play back mode the robots will be reading data that was previously stored in EEPROM while being controlled by the Arxterra App. What is being read from EEPROM is the direction that the robot was facing and the turn that the robot took at every decision point. This will allow the robot autonomously navigate throughout the maze since it will have the decision stored for every decision point throughout the robots path. For rooms such as hallways, corners, and a dead end the robot will always choose the same turn value so that does not require reading from EEPROM.
This software is developed to read data about direction and turn value every time a decision is made (room types 1, 2, and 4). It stores reads the data from EEPROM starting again at the address 0x0000. Every time the robot reaches a decision point, it will read the turn and direction value for that decision point and then use that to make its decision. The software in subroutines.ino file is the same as the subroutines.ino file in the blog post “Write to EEPROM”. The software specific to read EEPROM is in orange text within the EEPROM_Write.ino file below.
The roomType subroutine determines what room you’re in using “hitWall”, “rightHit”, and “leftHit”. “hitWall” ands the room value with a byte value from hit_table that is determined by the direction of the robot. The result will either be true or false depending if the robot is facing a wall or not. Then “rightHit” and “leftHit” just turns the robot and then implements hitWall again within the subroutines and determines if there’s a wall on the right and the left of the robot. This is then used to determine when a decision is required and when direction and turn must be read from EEPROM.
Data is read as follows:
| Address | Value |
| 0x0000 | Direction (decision 1) |
| 0x0001 | Turn (decision 1) |
| 0x0002 | Direction (decision 2) |
| 0x0003 | Turn (decision 2) |
| 0x0004 | Direction (decision 3) |
| … | … |
EEPROM_Write.ino (MAIN SETUP & LOOP)
//////////////////////////////////////////////////////////////// // Name : EEPROM Read maze data // // Author : Matt Shellhammer // // Date : 2 December, 2017 // // Version : 1.0 // //////////////////////////////////////////////////////////////// #define __PROG_TYPES_COMPAT__ // __PROG_TYPES_COMPAT__ #include <avr/pgmspace.h> #include <Robot3DoTBoard.h> #include <EEPROM.h> #include <Wire.h> #include <Servo.h> #include "maze.h" void setup() { Serial.begin(9600); delay(5000); } void loop() { static uint16_t EEPROM_Idx = 0x0000; // first EEPROM index is 0x0000 static uint8_t type = 0; // initially outside of the maze static bool decision; // create a variable called decision static myRobot_t robot_inst; // create an instance of myRobot_t called robot_inst // No decision to be made when in a Hallway or outside of the maze (go straight) if ((type == 0)||(type == 5)){decision = false;robot_inst.turn = 0x00;} // No decision to be made when in a left corner (turn left) if (type == 3){decision = false;robot_inst.turn = 0x10;} // No decision to be made when in a right corner (turn right) if (type == 6){decision = false;robot_inst.turn = 0x01;} // No decision to be made when at a dead end (turn around) if (type == 7){decision = false;robot_inst.turn = 0x11;} else{decision = true;} // Call read data to EEPROM when at a decision point if ((decision == true)&&(EEPROM_Idx < 0x400)){ // Call Arxterra custom command to request a turn value // Store dir facing and turn value uint8_t temp_dir = EEPROM_read(EEPROM_Idx);EEPROM_Idx++; // if (temp_dir != robot_inst.dir){//ERROR: Do something} robot_inst.turn = EEPROM_read(EEPROM_Idx);EEPROM_Idx++; } robot_inst = enterRoom(robot_inst); // Update robot_inst type = roomType(robot_inst); // Determine room type }
maze.h (Structure, array, and variable definitions)
struct coord_t{
uint8_t row = 0x13; // Robot is initially outside of the maze
uint8_t col = 0x00; // Robot is initially outside of the maze
};
struct myRobot_t{
uint8_t dir = 0x03; // Robot is initially facing north
uint8_t turn = 0x00; // First action is no turn
coord_t maze;
uint8_t room = 0x00; // Initial room is empty
uint8_t bees = 0x00; // No bees present
};
const uint8_t hit_table[] PROGMEM =
{0x08, // South (dir == 0b00)
0x02, // East (dir == 0b01)
0x04, // West (dir == 0b10)
0x01}; // North (dir == 0b11)
//Compass S E W N
//dir 00 01 10 11
const uint8_t turn_table[] PROGMEM =
{0b00, 0b01, 0b10, 0b11, // 00 no turn
0b10, 0b00, 0b11, 0b01, // 01 turn right
0b01, 0b11, 0b00, 0b10, // 10 turn left
0b11, 0b10, 0b01, 0b00 // 11 turn around
};
// row col dir
const int8_t map_table[] PROGMEM =
{1 , 0, // 00
0 , 1, // 01
0 , -1, // 10
-1 , 0 // 11
};
const int maze_length = 399;
const uint8_t theMaze[] PROGMEM =
// 00 01 02 03 04 05 06 07 08 09 0A 0B 0C 0D 0E 0F 10 11 12 13 14
{0x05,0x09,0x09,0x09,0x09,0x09,0x01,0x03,0x05,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x29,0x09,0x09,0x09,0x02, // 00
0x0C,0x09,0x09,0x03,0x05,0x09,0x0A,0x06,0x06,0x05,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x03,0x05,0x03,0x06, // 01
0x05,0x09,0x0B,0x06,0x06,0x05,0x09,0x0A,0x06,0x0C,0x09,0x09,0x09,0x09,0x09,0x01,0x0B,0x0C,0x0A,0x06,0x06, // 02
0x06,0x0D,0x09,0x0A,0x06,0x06,0x05,0x03,0x0C,0x09,0x09,0x03,0x05,0x09,0x09,0x0A,0x05,0x09,0x09,0x08,0x02, // 03
0x06,0x05,0x09,0x09,0x0A,0x06,0x06,0x0C,0x09,0x09,0x09,0x0A,0x0C,0x09,0x09,0x03,0x06,0x05,0x09,0x09,0x0A, // 04
0x06,0x0C,0x03,0x05,0x09,0x02,0x06,0x05,0x09,0x09,0x09,0x09,0x09,0x09,0x03,0x06,0x06,0x0C,0x03,0x05,0x03, // 05
0x06,0x05,0x0A,0x0C,0x03,0x06,0x06,0x06,0x05,0x01,0x03,0x07,0x05,0x03,0x06,0x06,0x06,0x05,0x0A,0x06,0x06, // 06
0x06,0x0C,0x09,0x03,0x0E,0x0C,0x08,0x02,0x06,0x06,0x06,0x06,0x06,0x06,0x0C,0x02,0x06,0x0C,0x09,0x02,0x06, // 07
0x06,0x05,0x0B,0x0C,0x09,0x09,0x09,0x08,0x02,0x06,0x06,0x06,0x06,0x0C,0x09,0x0A,0x04,0x09,0x0B,0x06,0x06, // 08
0x0C,0x08,0x09,0x09,0x09,0x09,0x01,0x01,0x02,0x06,0x0C,0x08,0x08,0x09,0x01,0x09,0x08,0x09,0x03,0x06,0x06, // 09
0x05,0x01,0x09,0x09,0x0B,0x07,0x06,0x04,0x02,0x0C,0x09,0x09,0x09,0x03,0x04,0x09,0x03,0x07,0x06,0x06,0x06, // 0A
0x06,0x0C,0x09,0x09,0x09,0x02,0x06,0x04,0x02,0x0D,0x09,0x09,0x09,0x0A,0x0C,0x03,0x06,0x06,0x06,0x06,0x06, // 0B
0x06,0x05,0x09,0x09,0x09,0x0A,0x06,0x0C,0x0A,0x05,0x09,0x09,0x09,0x09,0x03,0x06,0x06,0x06,0x06,0x06,0x06, // 0C
0x06,0x0C,0x09,0x09,0x09,0x03,0x04,0x09,0x09,0x08,0x0B,0x05,0x03,0x05,0x0A,0x06,0x06,0x06,0x06,0x06,0x06, // 0D
0x04,0x09,0x09,0x09,0x09,0x08,0x02,0x05,0x01,0x09,0x03,0x06,0x06,0x06,0x05,0x0A,0x0E,0x06,0x06,0x06,0x06, // 0E
0x06,0x05,0x09,0x09,0x09,0x09,0x0A,0x0E,0x06,0x07,0x06,0x06,0x06,0x06,0x06,0x05,0x09,0x0A,0x06,0x06,0x06, // 0F
0x06,0x0C,0x09,0x09,0x09,0x09,0x09,0x09,0x0A,0x06,0x06,0x06,0x06,0x0E,0x0E,0x06,0x05,0x09,0x0A,0x06,0x06, // 10
0x04,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x0A,0x0C,0x0A,0x06,0x05,0x09,0x0A,0x06,0x0D,0x09,0x0A,0x06, // 11
0x04,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x08,0x08,0x09,0x09,0x08,0x09,0x09,0x09,0x0A, // 12
};
subroutines.ino
/*
* Write data to EEPROM, NOTE: interrupts are disabled while writing
* @param uiAddress 16 bit interger pointing to the address of the data to write
* @param ucData 8 bit value signifying the data being written
*/
void EEPROM_write(uint16_t uiAddress, uint8_t ucData) {
/*Store SREG value before we disable Interrupts*/
char SREG_save = SREG;
noInterrupts();
/* Wait for completion of any Flash Write
Note:Only necessary if Flash Memory Manipulation is taking place */
while(SPMCSR &(1<<SPMEN));
/* Wait for completion of previous write */
while(EECR & (1<<EEPE));
/* Set up address and Data Registers */
EEAR = uiAddress;
EEDR = ucData;
/* Write logical one to EEMPE */
EECR |= (1<<EEMPE);
/* Start eeprom write by setting EEPE */
EECR |= (1<<EEPE);
/*Restore the SREG value*/
SREG = SREG_save;
}
/*
* Read data from EEPROM, NOTE: interrupts are disabled while writing
* @param uiAddress 16 bit interger pointing to the address of the data to read
* @return 8 bit value signifying the data that was read
*/
uint8_t EEPROM_read(uint16_t uiAddress) {
/*Store SREG value before we disable Interrupts*/
char SREG_save = SREG;
noInterrupts();
/* Wait for completion of any Flash Write
Note:Only necessary if Flash Memory Manipulation is taking place */
while(SPMCSR &(1<<SPMEN));
/* Wait for completion of previous write */
while(EECR & (1<<EEPE));
/* Set up address register */
EEAR = uiAddress;
/* Start eeprom read by writing EERE */
EECR |= (1<<EERE);
/*Restore the SREG value*/
SREG = SREG_save;
/* Return data from Data Register */
return EEDR;
}
myRobot_t enterRoom(myRobot_t robot){
robot = turnInMaze(robot);
robot = stepInMaze(robot);
robot = roomInMaze(robot);
return robot;
}
// Returns updated direction based on current direction and turn value
// values returned in robot structure
myRobot_t turnInMaze(myRobot_t robot){
// index = 4*turn_val + dir_val
uint8_t index = (robot.turn << 2) + robot.dir;
robot.dir = pgm_read_byte_near(turn_table + index);
return robot;
}
// Returns updated row and column values after taking a step in current direction
// values returned in robot structure
myRobot_t stepInMaze(myRobot_t robot){
// index = 2*robot.dir
uint8_t index = (robot.dir << 1);
robot.maze.row += pgm_read_byte_near(map_table + index); // Add either -1, 0, or 1 to current row value
robot.maze.col += pgm_read_byte_near(map_table + index + 1); // Add either -1, 0, or 1 to current column value
return robot;
}
// Returns updated room and bees values using current row and column values
// values returned in robot structure
myRobot_t roomInMaze(myRobot_t robot){
// index = 21*robot.maze.row + robot.maze.col
uint16_t index = (21*robot.maze.row) + robot.maze.col;
uint8_t maze_val = pgm_read_byte_near(theMaze + index);
robot.room = maze_val & 0x0F; // clear upper nibble and store as the room value
uint8_t temp_bees = (maze_val & 0xF0) >> 4; // clear lower nibble and store as the temp bees value
robot.bees += temp_bees; // add temp_bees to curret bees value
return robot;
}
// Room Type subroutine
uint8_t roomType(myRobot_t robot){
bool leftWall = leftHit(robot); // Test if hiting left wall
bool hit = hitWall(robot); // Test if facing wall
bool rightWall = rightHit(robot); // Test if hiting right wall
uint8_t room = (uint8_t(leftWall) << 2)|(uint8_t(hit) << 1)|uint8_t(rightWall); // Convert to room type
return room;
}
// Returns true if there is a wall and false if there is no wall
bool hitWall(myRobot_t robot){
// index = dir_val
robot = roomInMaze(robot); // Determine room value
uint8_t wallVal = pgm_read_byte_near(hit_table + robot.dir); // Determine wall bit based on direction
uint8_t outVal = bool(wallVal & robot.room); // Clear all bits other than the wall robot is facing
if (outVal == 0){return false;} // If the robot is not hiting a wall outVal will equal zero
else {return true;} // and the subroutine will return false, else it returns true.
}
// Returns true if there is a wall and false if there is no wall
// on the right side of the robot
bool rightHit(myRobot_t robot){
robot.turn = 0x01; // Modify turn value to turn right
robot = turnInMaze(robot); // Call turnInMaze to turn the robot (virtually)
bool hit = hitWall(robot); // Test hit wall
return hit;
}
// Returns true if there is a wall and false if there is no wall
// on the left side of the robot
bool leftHit(myRobot_t robot){
robot.turn = 0x02; // Modify turn value to turn left
robot = turnInMaze(robot); // Call turnInMaze to turn the robot (virtually)
bool hit = hitWall(robot); // Test hit wall
return hit;
}

By: Matt Shellhammer (Electronics & Control Engineer)
Approved by: Lucas Gutierrez (Project Manager)
Table of Contents
When in RC mode the robots will be controlled to travel through the maze with the Arxterra App through Bluetooth wireless communications. The robots are then required to memorize the path traveled and then repeat this path in playback mode. To make this possible information about the path must be saved while traveling through the maze. The information that will be saved is direction and turn so we know what direction the robot was facing and what direction it turned at each decision point. This data will be stored in EEPROM and then eventually read to implement playback mode.
This software is developed to store data about direction and turn value every time a decision is made (room types 1, 2, and 4). It stores data into the EEPROM starting at address 0x0000. Every time a decision is made it stores the direction, increments the counter, stores the turn value decided on, and then increments the counter again for the next time a decision is made. This storage method decided upon is limited to 512 decisions since the address range of EEPROM is 0x0000 to 0x03FF, 1 KB, and we store two bytes for every decision therefore only 512 decisions can be stored within EEPROM.
Data Stored as follows:
| Address | Value |
| 0x0000 |
Direction (decision 1) |
| 0x0001 | Turn (decision 1) |
| 0x0002 | Direction (decision 2) |
| 0x0003 | Turn (decision 2) |
| 0x0004 | Direction (decision 3) |
| … | … |
EEPROM_Write.ino (MAIN SETUP & LOOP)
////////////////////////////////////////////////////////////////
// Name : EEPROM Write maze data //
// Author : Matt Shellhammer //
// Date : 2 December, 2017 //
// Version : 1.0 //
////////////////////////////////////////////////////////////////
#define __PROG_TYPES_COMPAT__ // __PROG_TYPES_COMPAT__
#include <avr/pgmspace.h>
#include <Robot3DoTBoard.h>
#include <EEPROM.h>
#include <Wire.h>
#include <Servo.h>
#include "maze.h"
void setup() {
Serial.begin(9600);
delay(5000);
}
void loop() {
static uint16_t EEPROM_Idx = 0x0000; // first EEPROM index is 0x0000
static uint8_t type = 0; // initially outside of the maze
static bool decision; // create a variable called decision
static myRobot_t robot_inst; // create an instance of myRobot_t called robot_inst
// No decision to be made when in a Hallway or outside of the maze (go straight)
if ((type == 0)||(type == 5)){decision = false;robot_inst.turn = 0x00;}
// No decision to be made when in a left corner (turn left)
if (type == 3){decision = false;robot_inst.turn = 0x10;}
// No decision to be made when in a right corner (turn right)
if (type == 6){decision = false;robot_inst.turn = 0x01;}
// No decision to be made when at a dead end (turn around)
if (type == 7){decision = false;robot_inst.turn = 0x11;}
else{decision = true;}
// Call write data to EEPROM when a decision is made on the Arxterra App at a decision point
if ((decision == true)&&(EEPROM_Idx < 0x400)){
// Call Arxterra custom command to request a turn value (update robot_inst.turn)
// Store dir facing and turn value
EEPROM_write(EEPROM_Idx, robot_inst.dir);EEPROM_Idx++;
EEPROM_write(EEPROM_Idx, robot_inst.turn);EEPROM_Idx++;
}
robot_inst = enterRoom(robot_inst); // Update robot_inst
type = roomType(robot_inst); // Determine room type
}
maze.h (Structure, array, and variable definitions)
struct coord_t{
uint8_t row = 0x13; // Robot is initially outside of the maze
uint8_t col = 0x00; // Robot is initially outside of the maze
};
struct myRobot_t{
uint8_t dir = 0x03; // Robot is initially facing north
uint8_t turn = 0x00; // First action is no turn
coord_t maze;
uint8_t room = 0x00; // Initial room is empty
uint8_t bees = 0x00; // No bees present
};
const uint8_t hit_table[] PROGMEM =
{0x08, // South (dir == 0b00)
0x02, // East (dir == 0b01)
0x04, // West (dir == 0b10)
0x01}; // North (dir == 0b11)
//Compass S E W N
//dir 00 01 10 11
const uint8_t turn_table[] PROGMEM =
{0b00, 0b01, 0b10, 0b11, // 00 no turn
0b10, 0b00, 0b11, 0b01, // 01 turn right
0b01, 0b11, 0b00, 0b10, // 10 turn left
0b11, 0b10, 0b01, 0b00 // 11 turn around
};
// row col dir
const int8_t map_table[] PROGMEM =
{1 , 0, // 00
0 , 1, // 01
0 , -1, // 10
-1 , 0 // 11
};
const int maze_length = 399;
const uint8_t theMaze[] PROGMEM =
// 00 01 02 03 04 05 06 07 08 09 0A 0B 0C 0D 0E 0F 10 11 12 13 14
{0x05,0x09,0x09,0x09,0x09,0x09,0x01,0x03,0x05,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x29,0x09,0x09,0x09,0x02, // 00
0x0C,0x09,0x09,0x03,0x05,0x09,0x0A,0x06,0x06,0x05,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x03,0x05,0x03,0x06, // 01
0x05,0x09,0x0B,0x06,0x06,0x05,0x09,0x0A,0x06,0x0C,0x09,0x09,0x09,0x09,0x09,0x01,0x0B,0x0C,0x0A,0x06,0x06, // 02
0x06,0x0D,0x09,0x0A,0x06,0x06,0x05,0x03,0x0C,0x09,0x09,0x03,0x05,0x09,0x09,0x0A,0x05,0x09,0x09,0x08,0x02, // 03
0x06,0x05,0x09,0x09,0x0A,0x06,0x06,0x0C,0x09,0x09,0x09,0x0A,0x0C,0x09,0x09,0x03,0x06,0x05,0x09,0x09,0x0A, // 04
0x06,0x0C,0x03,0x05,0x09,0x02,0x06,0x05,0x09,0x09,0x09,0x09,0x09,0x09,0x03,0x06,0x06,0x0C,0x03,0x05,0x03, // 05
0x06,0x05,0x0A,0x0C,0x03,0x06,0x06,0x06,0x05,0x01,0x03,0x07,0x05,0x03,0x06,0x06,0x06,0x05,0x0A,0x06,0x06, // 06
0x06,0x0C,0x09,0x03,0x0E,0x0C,0x08,0x02,0x06,0x06,0x06,0x06,0x06,0x06,0x0C,0x02,0x06,0x0C,0x09,0x02,0x06, // 07
0x06,0x05,0x0B,0x0C,0x09,0x09,0x09,0x08,0x02,0x06,0x06,0x06,0x06,0x0C,0x09,0x0A,0x04,0x09,0x0B,0x06,0x06, // 08
0x0C,0x08,0x09,0x09,0x09,0x09,0x01,0x01,0x02,0x06,0x0C,0x08,0x08,0x09,0x01,0x09,0x08,0x09,0x03,0x06,0x06, // 09
0x05,0x01,0x09,0x09,0x0B,0x07,0x06,0x04,0x02,0x0C,0x09,0x09,0x09,0x03,0x04,0x09,0x03,0x07,0x06,0x06,0x06, // 0A
0x06,0x0C,0x09,0x09,0x09,0x02,0x06,0x04,0x02,0x0D,0x09,0x09,0x09,0x0A,0x0C,0x03,0x06,0x06,0x06,0x06,0x06, // 0B
0x06,0x05,0x09,0x09,0x09,0x0A,0x06,0x0C,0x0A,0x05,0x09,0x09,0x09,0x09,0x03,0x06,0x06,0x06,0x06,0x06,0x06, // 0C
0x06,0x0C,0x09,0x09,0x09,0x03,0x04,0x09,0x09,0x08,0x0B,0x05,0x03,0x05,0x0A,0x06,0x06,0x06,0x06,0x06,0x06, // 0D
0x04,0x09,0x09,0x09,0x09,0x08,0x02,0x05,0x01,0x09,0x03,0x06,0x06,0x06,0x05,0x0A,0x0E,0x06,0x06,0x06,0x06, // 0E
0x06,0x05,0x09,0x09,0x09,0x09,0x0A,0x0E,0x06,0x07,0x06,0x06,0x06,0x06,0x06,0x05,0x09,0x0A,0x06,0x06,0x06, // 0F
0x06,0x0C,0x09,0x09,0x09,0x09,0x09,0x09,0x0A,0x06,0x06,0x06,0x06,0x0E,0x0E,0x06,0x05,0x09,0x0A,0x06,0x06, // 10
0x04,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x0A,0x0C,0x0A,0x06,0x05,0x09,0x0A,0x06,0x0D,0x09,0x0A,0x06, // 11
0x04,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x08,0x08,0x09,0x09,0x08,0x09,0x09,0x09,0x0A, // 12
};
subroutines.ino
/*
* Write data to EEPROM, NOTE: interrupts are disabled while writing
* @param uiAddress 16 bit interger pointing to the address of the data to write
* @param ucData 8 bit value signifying the data being written
*/
void EEPROM_write(uint16_t uiAddress, uint8_t ucData) {
/*Store SREG value before we disable Interrupts*/
char SREG_save = SREG;
noInterrupts();
/* Wait for completion of any Flash Write
Note:Only necessary if Flash Memory Manipulation is taking place */
while(SPMCSR &(1<<SPMEN));
/* Wait for completion of previous write */
while(EECR & (1<<EEPE));
/* Set up address and Data Registers */
EEAR = uiAddress;
EEDR = ucData;
/* Write logical one to EEMPE */
EECR |= (1<<EEMPE);
/* Start eeprom write by setting EEPE */
EECR |= (1<<EEPE);
/*Restore the SREG value*/
SREG = SREG_save;
}
/*
* Read data from EEPROM, NOTE: interrupts are disabled while writing
* @param uiAddress 16 bit interger pointing to the address of the data to read
* @return 8 bit value signifying the data that was read
*/
uint8_t EEPROM_read(uint16_t uiAddress) {
/*Store SREG value before we disable Interrupts*/
char SREG_save = SREG;
noInterrupts();
/* Wait for completion of any Flash Write
Note:Only necessary if Flash Memory Manipulation is taking place */
while(SPMCSR &(1<<SPMEN));
/* Wait for completion of previous write */
while(EECR & (1<<EEPE));
/* Set up address register */
EEAR = uiAddress;
/* Start eeprom read by writing EERE */
EECR |= (1<<EERE);
/*Restore the SREG value*/
SREG = SREG_save;
/* Return data from Data Register */
return EEDR;
}
myRobot_t enterRoom(myRobot_t robot){
robot = turnInMaze(robot);
robot = stepInMaze(robot);
robot = roomInMaze(robot);
return robot;
}
// Returns updated direction based on current direction and turn value
// values returned in robot structure
myRobot_t turnInMaze(myRobot_t robot){
// index = 4*turn_val + dir_val
uint8_t index = (robot.turn << 2) + robot.dir;
robot.dir = pgm_read_byte_near(turn_table + index);
return robot;
}
// Returns updated row and column values after taking a step in current direction
// values returned in robot structure
myRobot_t stepInMaze(myRobot_t robot){
// index = 2*robot.dir
uint8_t index = (robot.dir << 1);
robot.maze.row += pgm_read_byte_near(map_table + index); // Add either -1, 0, or 1 to current row value
robot.maze.col += pgm_read_byte_near(map_table + index + 1); // Add either -1, 0, or 1 to current column value
return robot;
}
// Returns updated room and bees values using current row and column values
// values returned in robot structure
myRobot_t roomInMaze(myRobot_t robot){
// index = 21*robot.maze.row + robot.maze.col
uint16_t index = (21*robot.maze.row) + robot.maze.col;
uint8_t maze_val = pgm_read_byte_near(theMaze + index);
robot.room = maze_val & 0x0F; // clear upper nibble and store as the room value
uint8_t temp_bees = (maze_val & 0xF0) >> 4; // clear lower nibble and store as the temp bees value
robot.bees += temp_bees; // add temp_bees to curret bees value
return robot;
}
// Room Type subroutine
uint8_t roomType(myRobot_t robot){
bool leftWall = leftHit(robot); // Test if hiting left wall
bool hit = hitWall(robot); // Test if facing wall
bool rightWall = rightHit(robot); // Test if hiting right wall
uint8_t room = (uint8_t(leftWall) << 2)|(uint8_t(hit) << 1)|uint8_t(rightWall); // Convert to room type
return room;
}
// Returns true if there is a wall and false if there is no wall
bool hitWall(myRobot_t robot){
// index = dir_val
robot = roomInMaze(robot); // Determine room value
uint8_t wallVal = pgm_read_byte_near(hit_table + robot.dir); // Determine wall bit based on direction
uint8_t outVal = bool(wallVal & robot.room); // Clear all bits other than the wall robot is facing
if (outVal == 0){return false;} // If the robot is not hiting a wall outVal will equal zero
else {return true;} // and the subroutine will return false, else it returns true.
}
// Returns true if there is a wall and false if there is no wall
// on the right side of the robot
bool rightHit(myRobot_t robot){
robot.turn = 0x01; // Modify turn value to turn right
robot = turnInMaze(robot); // Call turnInMaze to turn the robot (virtually)
bool hit = hitWall(robot); // Test hit wall
return hit;
}
// Returns true if there is a wall and false if there is no wall
// on the left side of the robot
bool leftHit(myRobot_t robot){
robot.turn = 0x02; // Modify turn value to turn left
robot = turnInMaze(robot); // Call turnInMaze to turn the robot (virtually)
bool hit = hitWall(robot); // Test hit wall
return hit;
}
https://www.techworm.net/wp-content/uploads/2015/05/Untitled27-e1432324102995.png

By: Matt Shellhammer (Electronics & Control Engineer)
Approved by: Lucas Gutierrez (Project Manager)
To use the Arxterra App to control the robots at The Robot Company, custom commands to override the MOVE command have to be defined. These custom commands will be defined to be used with the Arxterra App’s D-pad while the robots are within RC mode.
The D-pad will be defined with custom commands to move the car forward, left, right, and back (turn around) matching the buttons on the D-pad up, left, right, and down respectively. What these buttons on the D-pad will be defined to do is call predefined turn commands (per-project) and it will update the turn value of the robot. Then the previous direction the robot was facing and the turn value will be stored into EEPROM using write to EEPROM software within the main loop.
The custom commands to override the MOVE command will be defined within the moveHandler subroutine and follow the convention defined for the command packet structure. Below is an example of a MOVE command override. The custom commands will be defined outside of the main loop either below the main loop or within another .ino file within the same folder.
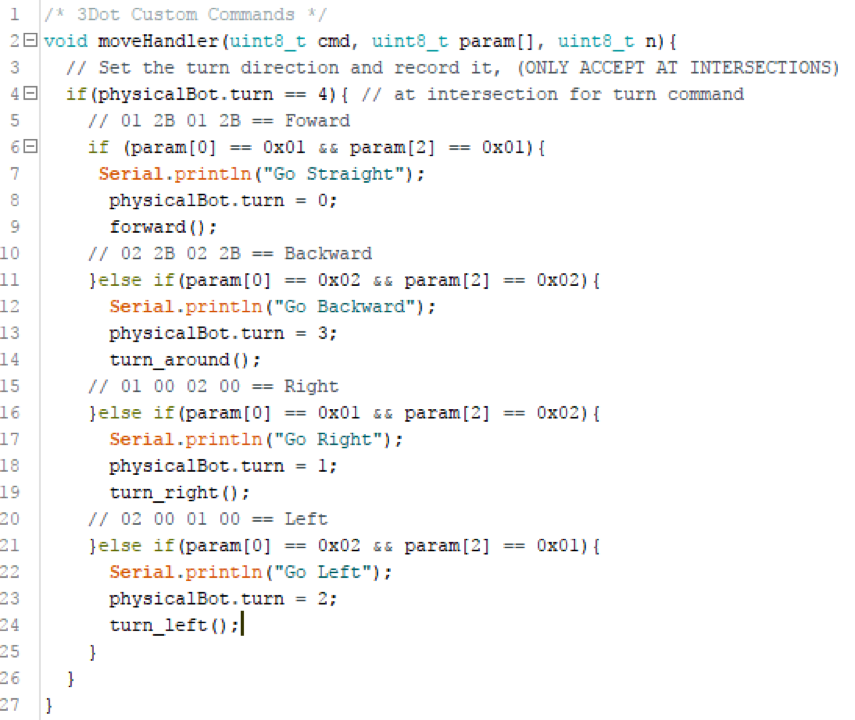
Figure 1. custom command MOVE override example

By: Andrew Yi (Mission, System, & Test Engineer)
Approved by: Lucas Gutierrez (Project Manager)
Legend: BLUE (keep as is), RED (changes made), PURPLE (new changes)
Level 2 Requirements:
L1-1 ModWheels shall be completed by Wednesday, December 13th, 2017.
L1-2 ModWheels will be a toy robot.
L1-3 ModWheels shall cost no more than $200.
L1-4 ModWheels will use a 3DoT board.
L1-5 ModWheels shall use a peripheral custom PCB connected to 3DoT board.
New changes below:
See L2-9, no longer need custom PCB
L1-6 ModWheels will be able to be controlled through the ArxRobot App or Arxterra Control Panel.
L1-7 ModWheels shall navigate a multi-colored 2D maze.
L1-8 ModWheels shall stop when another robot has been detected within a 1.5 foot radius ahead.
New changes below:
L1-8 ModWheels shall stop when another robot has been detected 6 inches from the front of the toy car.
L1-9 ModWheels should be able to avoid collisions with other robots operating within the maze.
L1-10 ModWheels shall provide video feedback through a smartphone placed on the toy car.
L1-11 ModWheels shall weigh no more than 500 grams (without phone).
L1-12 ModWheels shall be able to memorize a path through the maze taught by the user.
L1-13 ModWheels should be able to travel down the memorized path autonomously.
L1-14 ModWheels should be able to adopt an electronic differential with dual rear motors.
L1-15 ModWheels should be able to adopt a slip differential with dual rear motors.
Level 2 reqs:
L2-1 ModWheels will have a 3DoT board mounted on the chassis of the ModWheels toy car. (see L1-4)
L2-2 ModWheels shall use 2 color sensors to detect the walls within the maze so that it can keep itself within the confines of the hallways. (see L1-7)
New changes below:
L2-2a. ModWheels will use 2 color sensors.
L2-2b. ModWheels shall utilize the color sensors (2) to detect the black lines in the maze (Line Follower).
L2-3 ModWheels shall use the ultrasonic sensors to detect other objects 1.5 feet in front of the toy car. (see L1-8)
New changes below:
L2-3a ModWheels will use a proximity IR sensor.
L2-3b ModWheels shall use the proximity IR sensor to detect other robots in the maze.
L2-3c ModWheels shall pause (cease motor functions) when another robot is detected 6 inches from the front of the ModWheels toy car.
L2-4 ModWheels will be controllable through Arxterra App using the HM-11 Bluetooth module on the 3DoT board. The Arxterra App has a graphical user interface (GUI) that allows control of the toy robot. (see L1-6).
New changes below:
L2-4 ModWheels will be controllable through the Arxterra App’s GUI control panel.
L2-5 ModWheels should have an area for a smartphone to be placed onto it. The phone should have a periscope attachment on its camera and will provide live feed video via the Arxterra App. (see L1-10)
New changes:
L2-5a ModWheels will have an area for a smartphone to be placed onto it.
L2-5b ModWheels shall provide live video feed from the toy robot through the Arxterra App control panel.
L2-6 ModWheels shall navigate a maze autonomously after it has cleared the maze with user input. The autonomous route shall follow the original route without user input. (see L1-12)
L2-7 ModWheels will be a remote controllable toy car with a paper shell overlay. The paper shell overlay gives the ModWheels its customizability. (see L1-2)
L2-9 ModWheels shall use a custom PCB to control the ultrasonic, infrared, and color sensors. This PCB shall be connected to the 3DoT board aboard the chassis. (see L1-5)
New changes:
Provided a blog post for justification as to why ModWheels does not require a custom PCB.
L2-10 ModWheels shall use 2 infrared (IR) sensors to detect the black lines in the maze that indicate intersections. (see L1-7)
New changes:
See L2-3
L2-11 ModWheels shall stop when another robot is detected to be 1.5 feet in front of the toy car. (see L1-8)
New changes:
See L2-3 changes. This is no longer needed.
L2-12 ModWheels shall cease all motor functions when another robot is detected 1.5 feet in front of it. It shall resume resume normal operations after the robot has left the detection area. (see L1-8)
New changes:
L2-12 ModWheels shall resume normal operations (after detecting another robot) after identifying its priority. (needs more info, possible subsections regarding the rules).
L2-13a ModWheels will have an encoder for each of the motors.
L2-13b ModWheels should use the encoders to adopt a(n) (slip or electronic, or both) differential.

{kind=link}
{kind=link}
{kind=link}
{kind=link}