{kind=link}
Fall 2017: ModWheels Cable Diagram
By: Natalie Arevalo (Design & Manufacturing Engineer)
Approved by: Lucas Gutierrez (Project Manager)
Introduction
Among the requirements set by the Robot Company, all projects must design and fabricate a custom PCB. However, due to the nature of our project and its design, a custom PCB is not necessary. In order to get the requirement of the custom PCB waived, the cable diagram for our project must be provided. The following is the cable diagram for our robot accompanied by a description. The description and diagram show that the components within our design can be directly connected into the 3Dot board without being interfaced through a custom PCB.
Cable Diagram
The electrical components implemented in our design include one 3DoT board, one generic color shield, two motors each with an encoder, one servo, and one proximity sensor. The majority of the components listed can be directly connected into the 3DoT board. For instance, the generic color shield will be directly connected into the color shield header on the bottom side of the board. Additionally, the servo used in the design is also directly connected into the male servo header on the 3DoT board. Furthermore, the SDA and SCL connections on the proximity sensor are directly connected into the SDA and SCL female connections on the board. Also, the A channel connections on both encoders are directly connected into the A0 and A1 female connectors on the 3DoT. Then, the M1 and M2 connections of both encoders are placed into the female connectors for motor drivers B and A on the board. The only connections placed indirectly into the 3DoT board are the ground and VCC connections for both of the encoders and the proximity sensor. These are placed into the 3.3 V and ground female connectors on the 3DoT board through some minor breadboarding. The two encoders on the motors, as well as the proximity sensor, have ground connections that are soldered in series on a through hole breadboard. A lead coming off of this breadboard, connected in series with the other ground connections, is then connected directly into the ground female connector on the 3DoT board. This set-up is then repeated for the 3.3 V connection on the proximity sensor and both VCC connections on the encoders. The lead coming off of their respective through hole breadboard is connected into the 3.3 V female connector on the 3DoT board. As shown below and detailed above, the majority of the connections needed for our components can be directly placed into the board. The only exceptions are the VCC and ground connections for the encoders and proximity sensors. This is resolved by soldering these connections in series on a through hole breadboard and then connecting a lead off of that directly into the respective female connectors on the 3DoT board. With this small design implementation, all components are eventually connected directly into the board thus eliminating the need for a custom PCB.
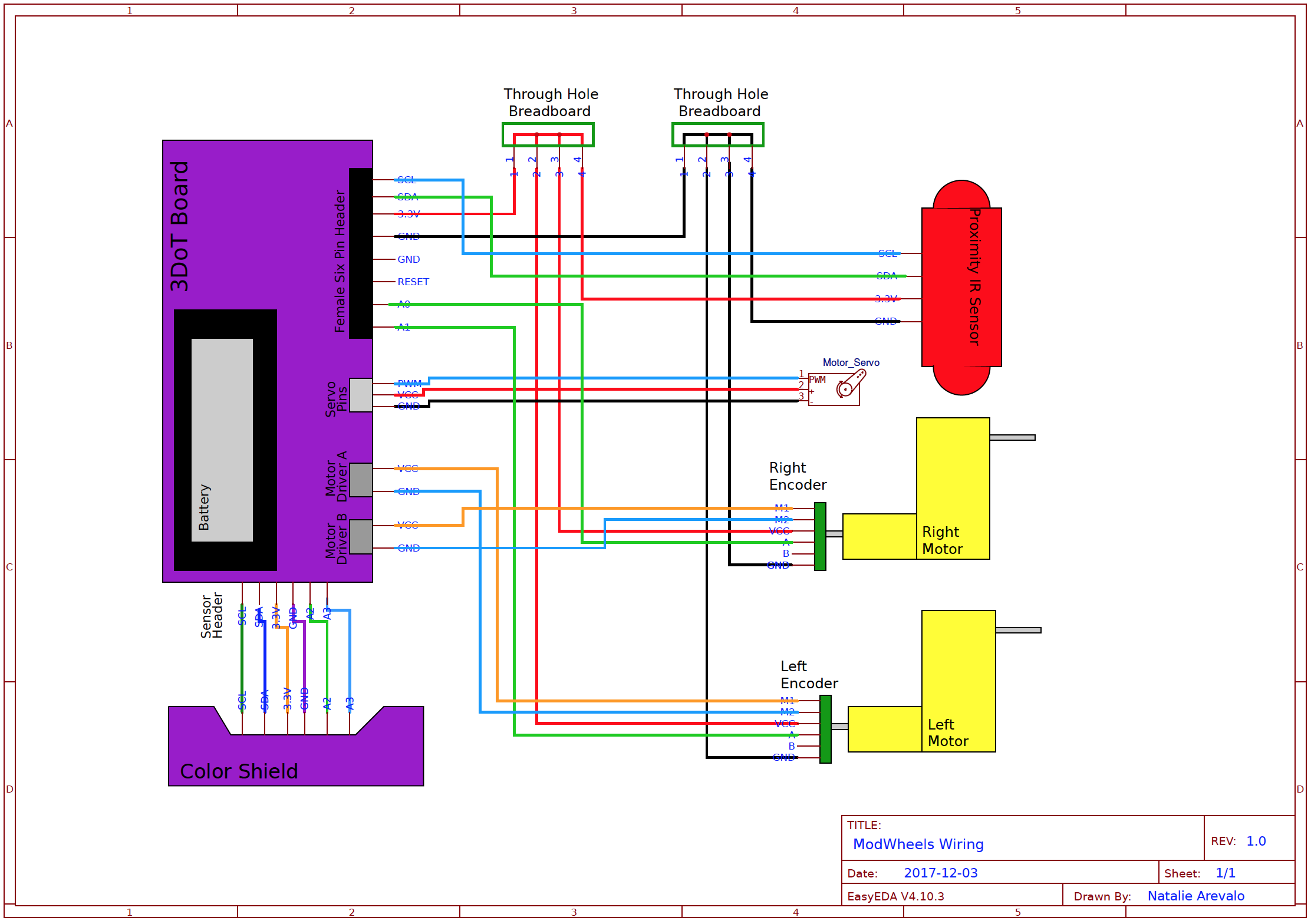
Figure 1: Cable Diagram
Update
Due to unforeseen complications, 3DoT boards will not be available to be incorporated into our design. Instead, we will be executing the mission by incorporating break out boards that are connected on a breadboard. We will be using a ProMicro, a motor driver, as well as an HM 10 bluetooth module in place of the 3DoT board. We will also be using an IR shield instead of a color shield because there were complications with the fabrications of these as well. As a result, the cable diagram for our design has changed drastically. The new components and their incorporation onto the breadboard are shown in the updated cable diagram below.
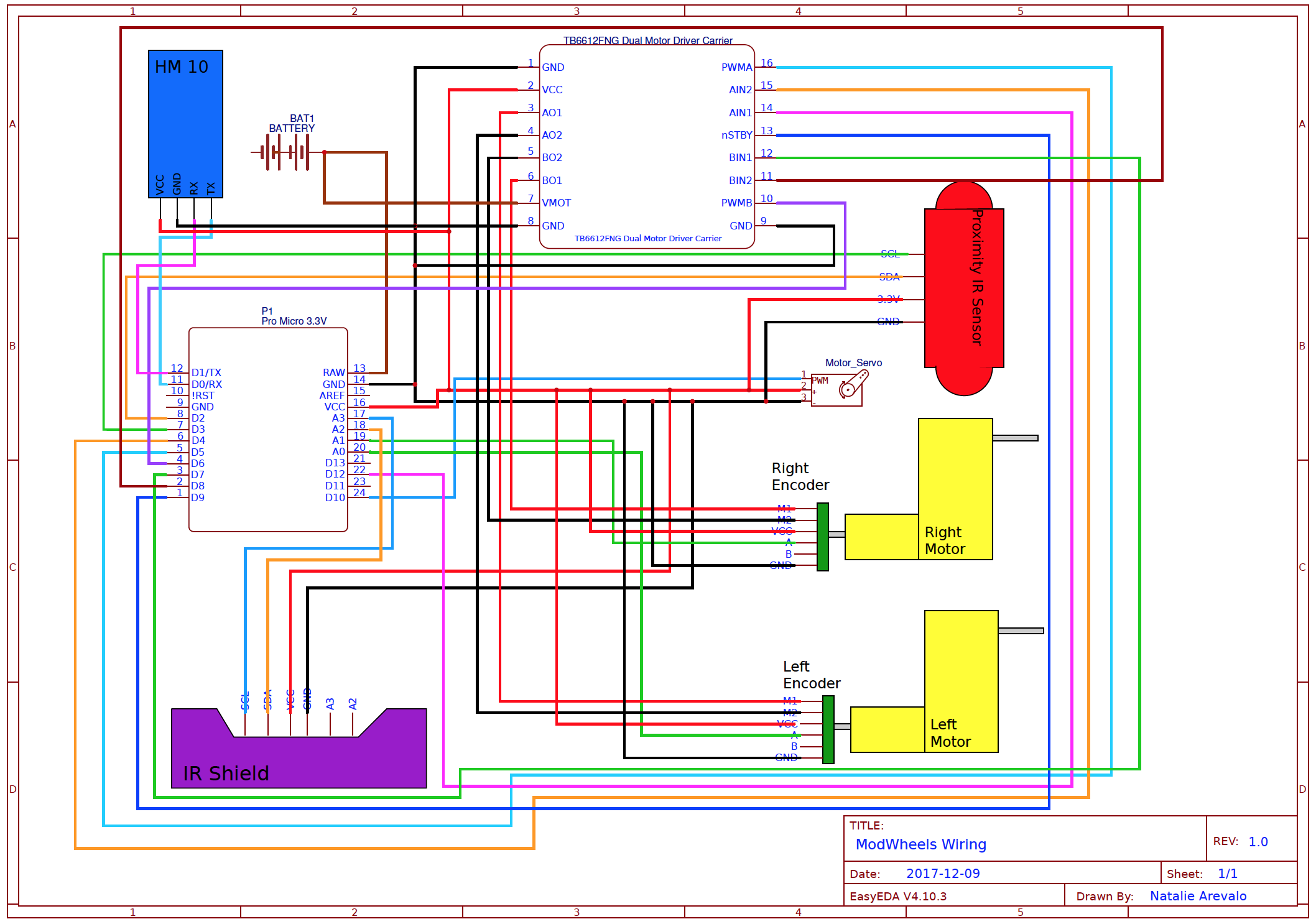
Figure 2: Updated Cable Diagram