{kind=link}
Fall 2017: ModWheels Electronics Design
By: Matt Shellhammer (Electronics & Control Engineer)
Approved by: Lucas Gutierrez (Project Manager)
Discussion
Due to complications with the fabricated 3DoT v5.03 and the limited amount of time we were required to resort to the use of the Sparkfun pro micro and motor driver for the final implementation. The IR sensor shield was used in our design to preform line following throughout the maze to keep the car within the maze and on a straight path. The IR sensor shield was also used to detect intersections so ModWheels could monitor its location within the maze and travel the correct path (either predefined or defined with Arxterra). The servo was used in the front of our chassis within a custom built servo holder to steer the ModWheels car. It was used with a steering mechanism that was based on the Sandblaster 3D sand buggy front wheel steering mechanism. The turns were then implemented using the micro servo as well as the two GM6 motors and two magnetic Hall Effect encoders to perform electronic differential steering and electronic differential turning.
Electronic Design
Electronic Devices Used
- Substitute for 3DoT v5.03
- Sparkfun Pro Micro (3.3V/8MHz – 32U4)
- Sparkfun Motor Driver (TB6612FNG)
- IR sensor shield (designed by Charles & Muhannad)
- Micro Servo
- Two Extended Shaft GM6 Gear motors
- Two Magnetic Hall Effect Encoders
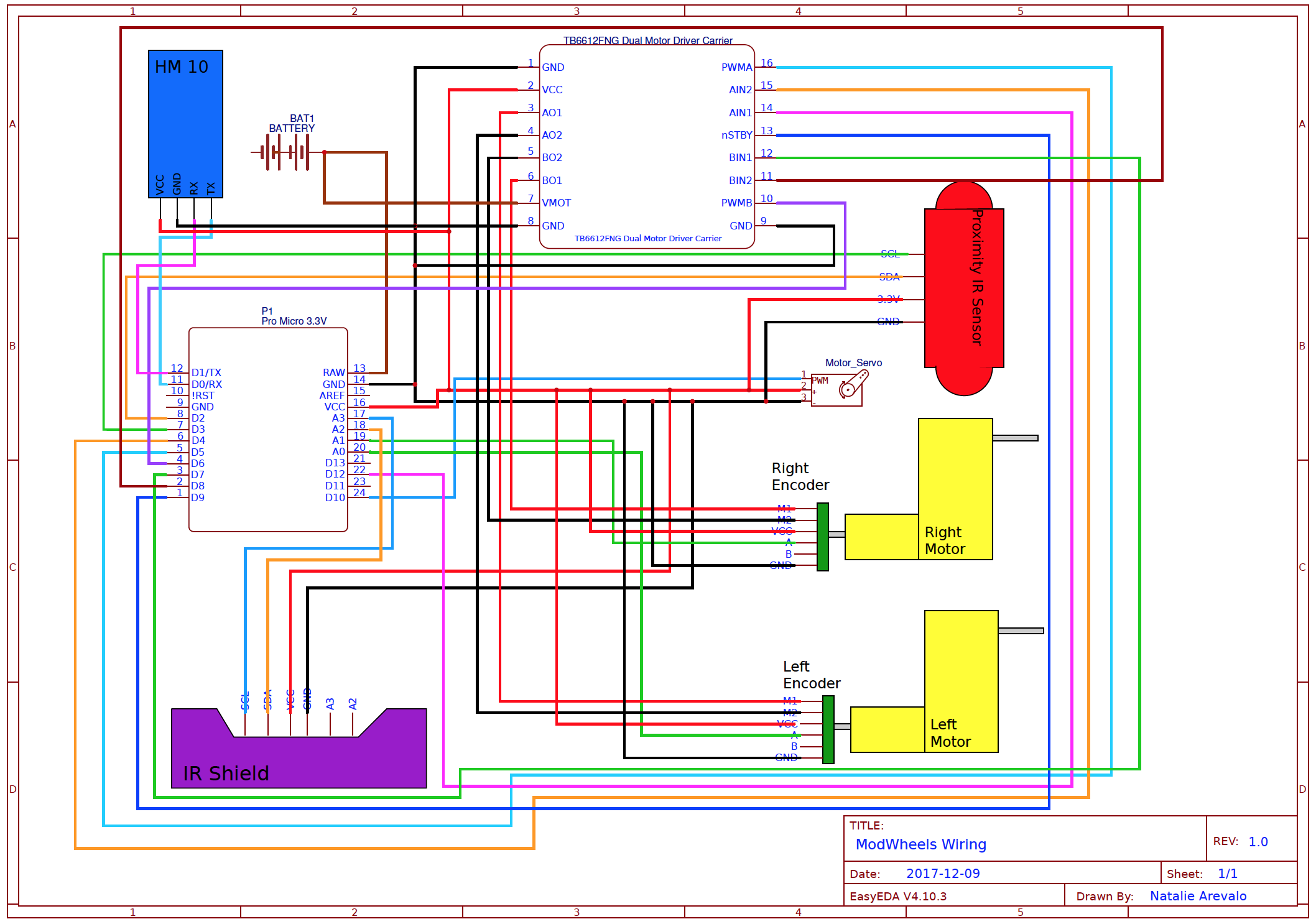
Figure: Wiring Diagram