
Spring 2017 Prosthetic Arm: Battery Discharge Test
The Robot Company | CEO Professor Gary Hill
Blog Post Created by Project Manager | Bianca Esquivel
Project Test Executed by Mission, Systems, and Test Engineer | Phuong Tran and Electronics and Control Engineer | Mikael Movsisyan
Table of Contents
Preliminary Information
Test Objective
During our design of the prosthetic limb system, quantifying power supply for the system becomes one of the important tasks. Which type of battery to use? How much capacity do we need? What is the nominal voltage rating for the battery? These questions were answered after this test.
This experiment is performed in response to requirement
L1.3 – The Prosthetic Arm shall be able to operate for at least 16 minutes and 39 seconds (999 seconds) which is the duration allowed to play a game of minesweeper.
Problem: Determine battery voltage, capacity, and dimension
Materials
(1) 7.4V 800mAh 2S LiPo
(1) 11.1V 2200mAh 3S LiPo
(1) LiPro Balance Charger
Test Set Up
Steps:
Step 1: Charge the battery to full based on the battery’s specs using the LiPro Balance Charger at 1A current
Step 2: Discharge the battery at constant 1A and record discharge time
Step 3: Charge the battery to full based on the battery’s specs at 1A
Step 4: Repeat step 1 to 3 for the other battery
Results
| Battery | 7.4V 800mAh 2S LiPo | 11.1V 2200mAh 3S LiPo |
|---|---|---|
| Discharging Time | 3.47 Minutes (Fig. 1) | 32.06 Minutes (Fig. 3) |
| Charging Time | 3.09 Minutes (Fig. 2) | 35.46 Minutes (Fig. 4) |
Results
According to the result table, for the 11.1V 2200mAh 3S LiPo, the measured capacity is
1A * 0.543hr = 543mAh
This number is smaller than the rated 2200mAh. The reason for this is because Lipo battery cannot be exhausted completely. The nominal voltage rating for each cell is 3.7V. We cannot exhaust each cell to be less than 3V.
Figure 1

Figure 2

Figure 3
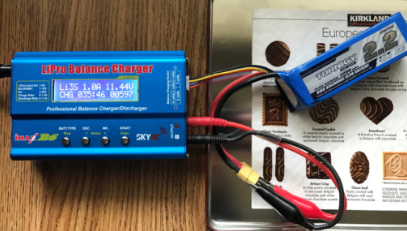
Figure 4

Conclusion
The battery is discharged at 1A current because that is the average current drawn by the prosthetic arm and hand system. According to the discharging time, we choose 11.1C 2200mAh 3S LiPo system for our design. We choose LiPo battery because it can deliver the current needed. In a separate experiment, we try using 9V alkaline and 7.4V NiCd battery. Both of these types of batteries do not deliver the current needed for the arduino to run the servo. The warning light of the arduino keeps blinking. Voltage is 5V at the servo pin; however, without the necessary current, the servo did not rotate. We chose 3S LiPo for size optimization. During the design of the lower forearm portion of the prosthetic arm, the battery cannot exceed a certain dimension. Hence, 14.8V 4S LiPo was not considered in our test. The chosen battery 11.1V 2200mAh 3S LiPo satisfies the time requirement and meets the specified size.