
Spring 2017 Prosthetic Arm: Temperature Sensor Waveform Input Test
The Robot Company | CEO Professor Gary Hill
Blog Post created by Project Manager | Bianca Esquivel
Project Test Executed by Mission, Systems, and Test Engineer | Phuong Tran and Electronics and Control Engineer | Mikael Movsisyan
Table of Contents
Preliminary Information
Test Objective
Purpose: This experiment satisfies the L1.4 Requirement of Safety – The operating temperature of the prosthetic arm shall not exceed 50 degrees Celsius for safety reasons.
Aim: Test the input of an analog through-hole LM34 temperature sensor and obtain the results as a waveform.
Materials
Basic Stamp Board from EE370L with heater circuit
StampPlot Pro
Arduino UNO
Test Set Up
- Connect ground of BasicStamp to ground of Arduino UNO
- Connect output of LM34 to analog pin of MCU
- Use StampPlot Pro Manual Incubator macro to turn on heater
- Read the analog input from the temperature sensor using the serial plotter feature of Arduino IDE
- Heat to 122F i.e. 50oC (as is the safety threshold, at which the sleep ISR should be triggered)
Basic Stamp Temperature Sensor Circuit

Results
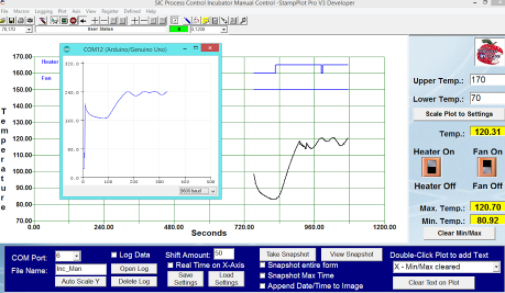
The analog temperature from the LM34 sensor was read successfully and it reached the desired threshold.
Arduino IDE Serial Plotter overlaying Stamp-Plot Pro Graph
Conclusion
The surface-mount LM34 analog of the through-hole component is expected to behave similarly, with an output directly proportional to the Fahrenheit temperature.