
Spring 2017 Prosthetic Hand: Final Document
The Robot Company | CEO Professor Gary Hill
Blog Post Created by Project Manager | Bianca Esquivel
Mission, Systems, and Test Engineer | Chris Bautista Electronics and Control Engineer | Forest Nutter
Design and Manufacturing Engineer | David Mendoza
Table of Contents
Executive Summary
By Project Manager | Bianca Esquivel
Project Objective
There are 3 main project objectives that address the problem of the customer being born without a right hand and cater to his preferred recreational activities:
Being able to operate a computer mouse, specifically being able to right click and left click.
- Ability to scroll is a plus.
Being able to pick up and drink a cup of water.
- Ability to pick up thin/fragile paper cup is a plus.
Being able to pick up and eat a chips ahoy cookie without breaking the cookie.
- Ability to pick up and eat a sun-chip without breaking the chip is a plus.
Mission Profile
Mission Profile from Start to Finish:
- Customer will sit down at a desk in front of a computer with a cup of water and a plate of cookies within the reach of his prosthetic hand
- The computer will have a game of minesweeper ready to play
- With the prosthetic hand he will be able to operate the mouse to play minesweeper and reset the game if he should lose or restart the game should he win
- He will be able to grasp the cup of water within his reach to drink from at his leisure without crushing the cup
- He will be able to rotate his wrist and grasp a chips ahoy cookie within his reach and eat one at a time at his leisure without crushing the cookie
The Design
- Complements the measurements of the customer
- No force sensors are included in the thumb therefore, it isn’t included in the picture
- Tips of the fingers are equipped with force sensors and rubber tips to help with gripping objects
Project Features
- Rubber fingertips for better gripping capabilities
- Force Sensors for a more controlled grip
- Flex Sensors used to control the grip with the use of the toes
- PLA Material due to project budget
System Design
By Mission, Systems, and Test Engineer | Chris Bautista
System Interface
Link to Interface Definitions:
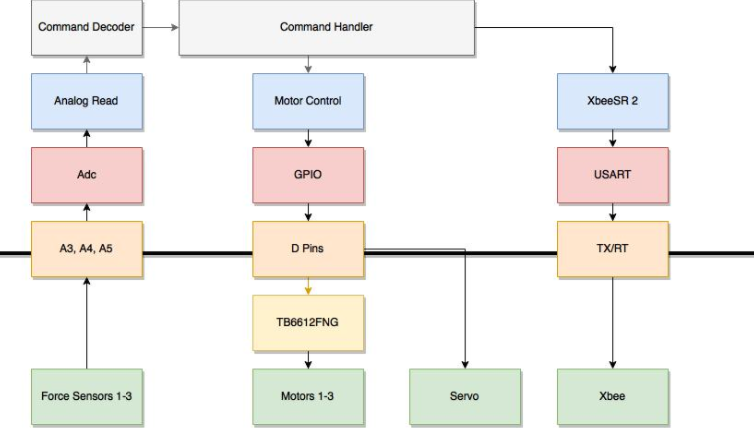
System Block Diagram
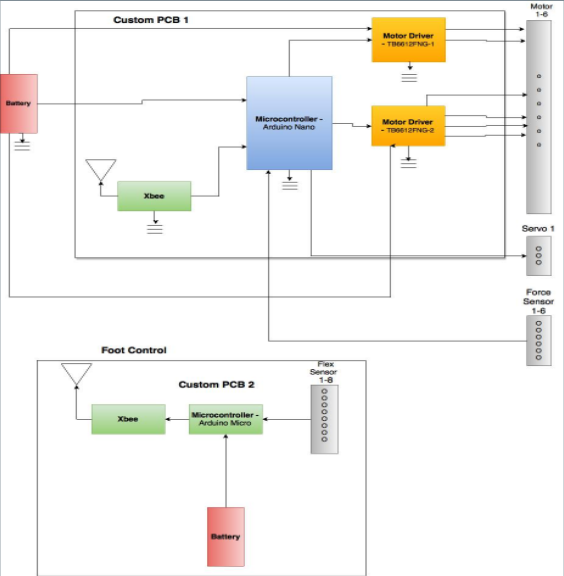
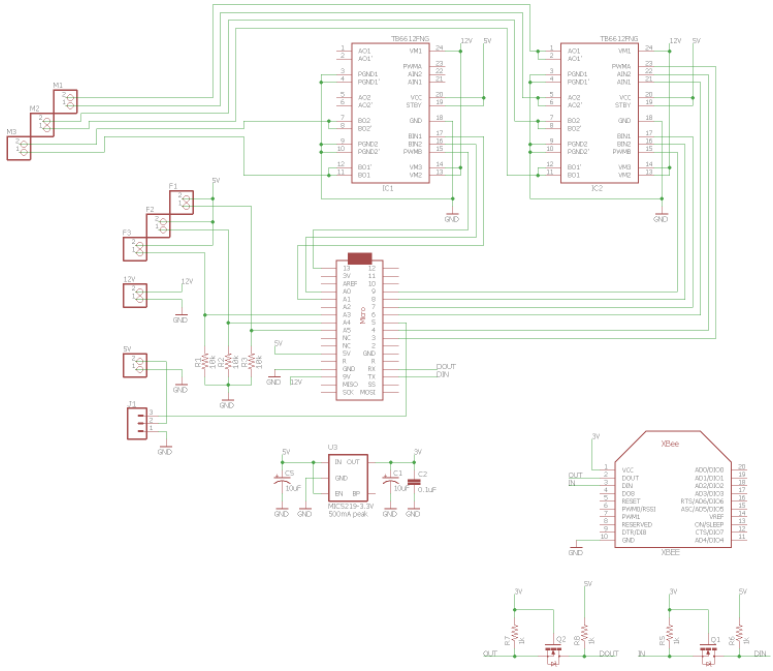
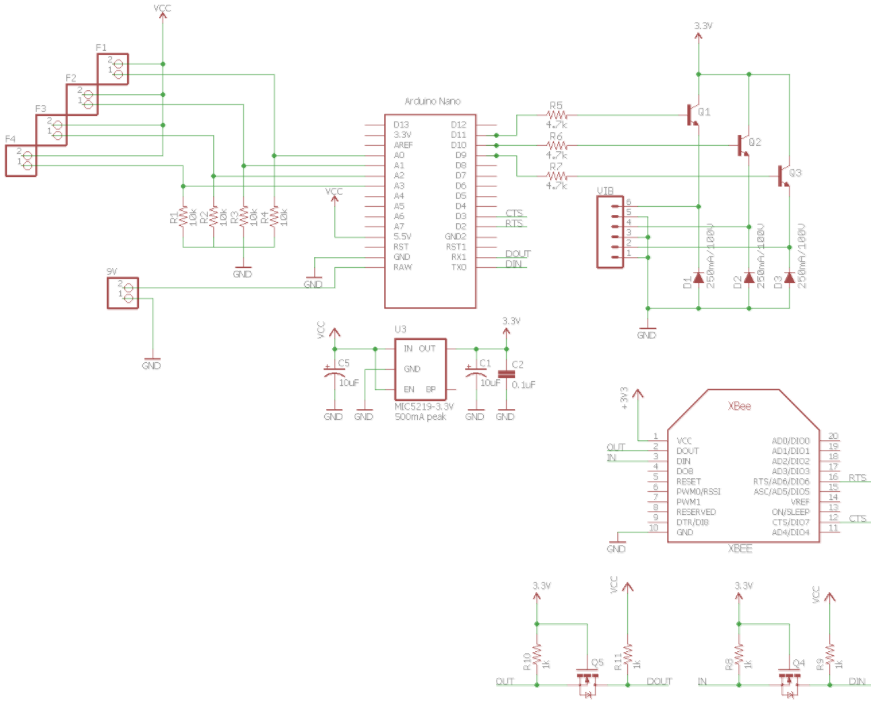
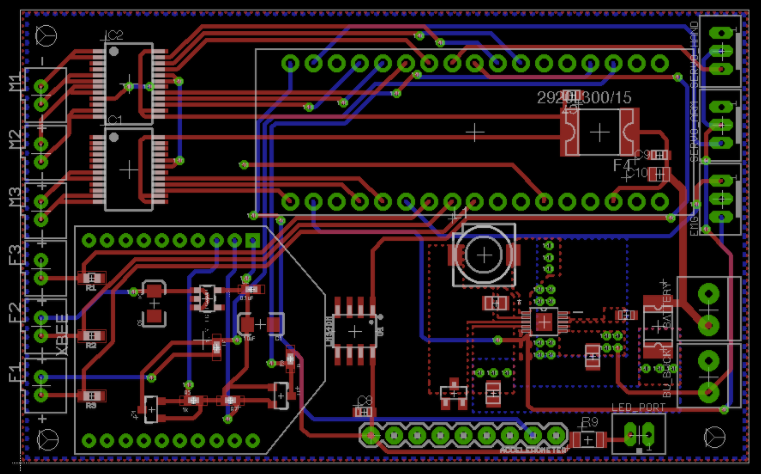
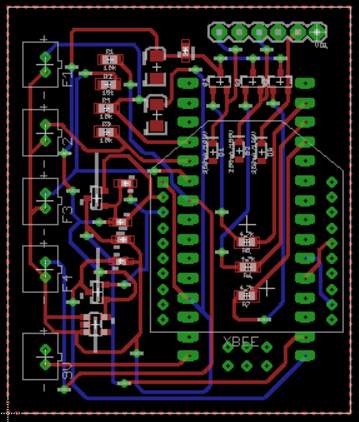
Electronics Design
by Electronics and Control Engineer | Forest Nutter
Electronics Custom Parts
TB6612FNG
Motor Driver Requirements Needed
- 11v input
- 5v logic
- H-bridge included
- 0.15A output current
Reason for specified IC
- SMD available
- Break out board sold from sparkfun for testing
- Available on DigiKey
Link to requirements
- L1-2 Motion
- The prosthetic hand shall have individual motion in at least 2 fingers
- L2-3 Motors
- The hand should flex and extend using motors.
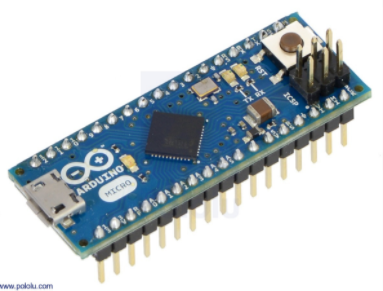
Arduino Micro
Purpose
- Receive and send data from the xbee
- Read Analog voltages from the force resistors
- Control the motor drivers based on inputs from the xbee
- Control the servo based on inputs from the xbee
Reason for specified MCU
- Serial Communication
- 6 Analog Pins
- 6 Digital Pins
- 4 PWM Pins
- 1 Timer
- 5v logic, but also accepts 3.3v logic
- Useful because xbee is a 3.3v device
- Available from last semester

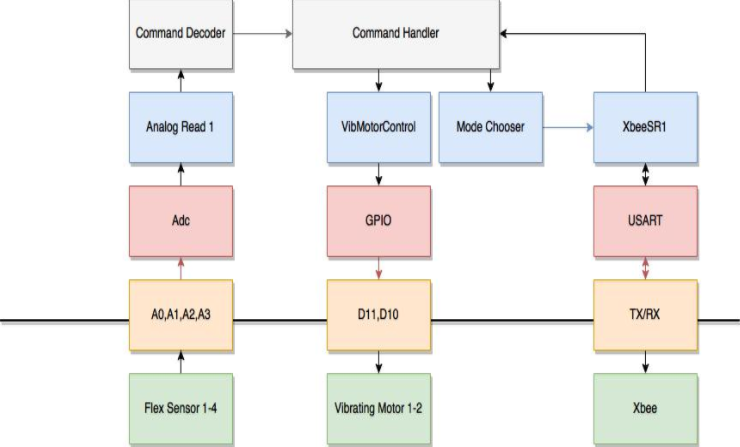
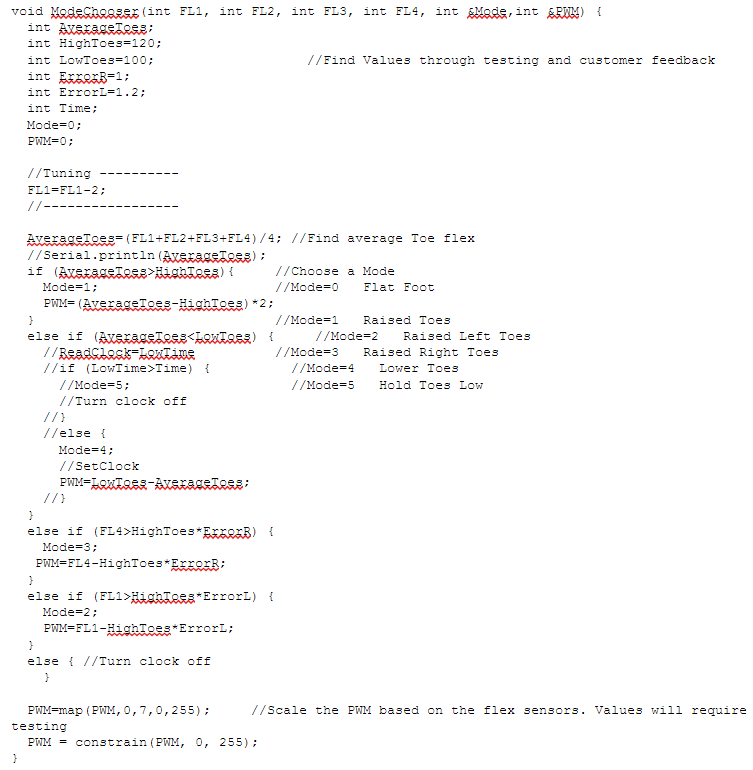
Firmware: Foot PCB Code
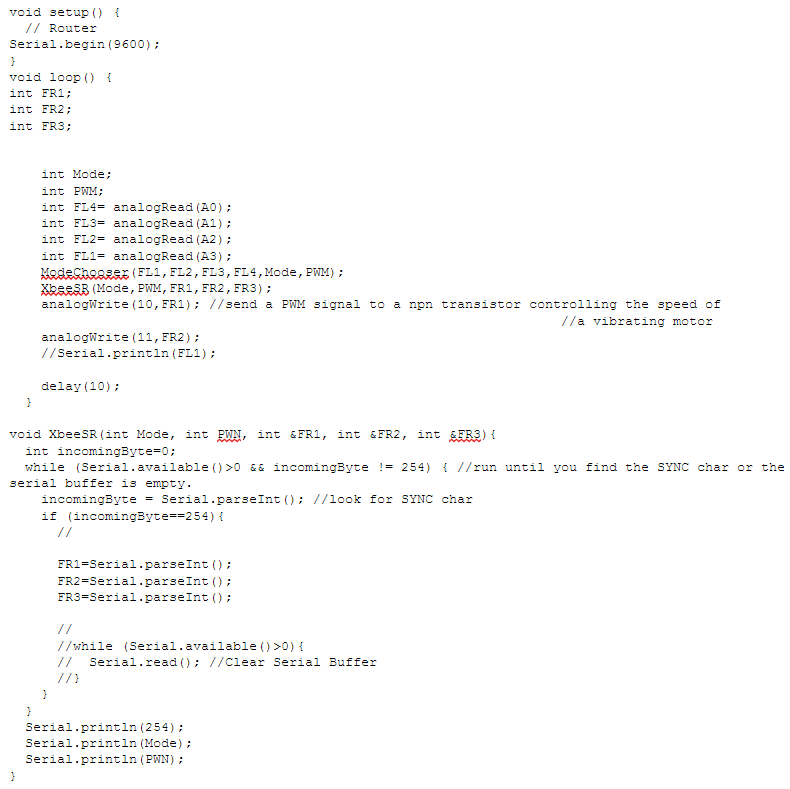
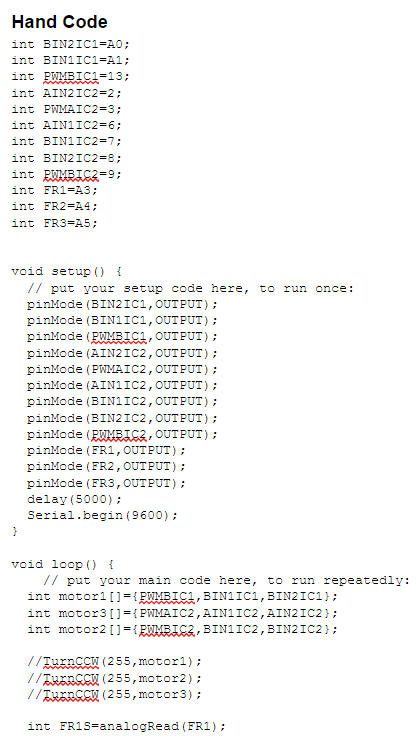
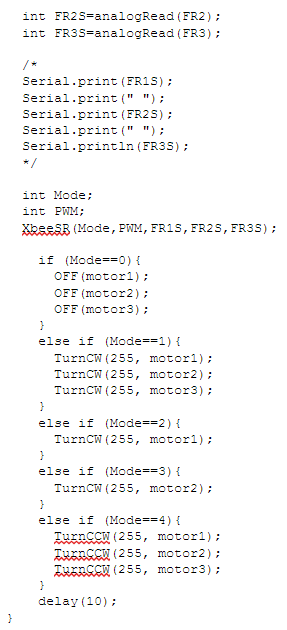
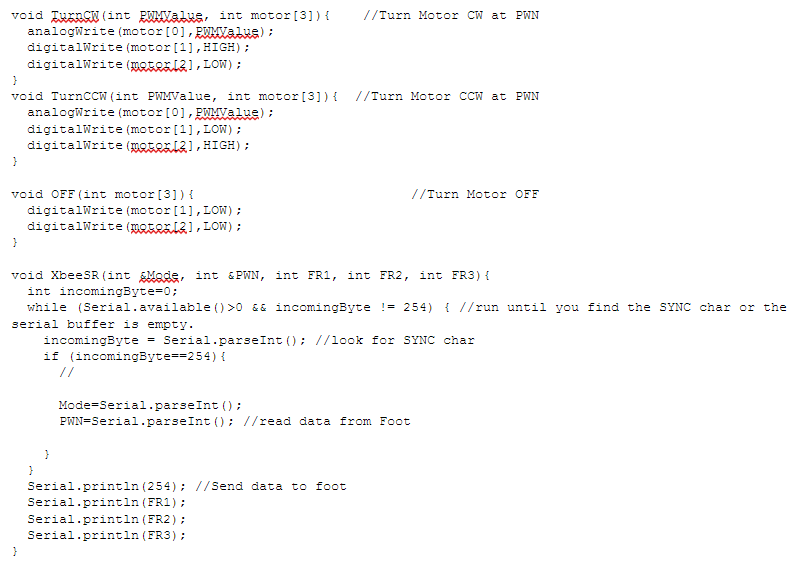
Firmware: Hand PCB Code
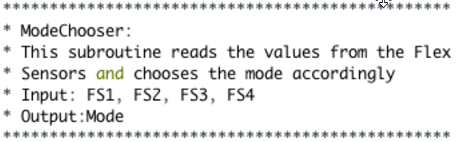
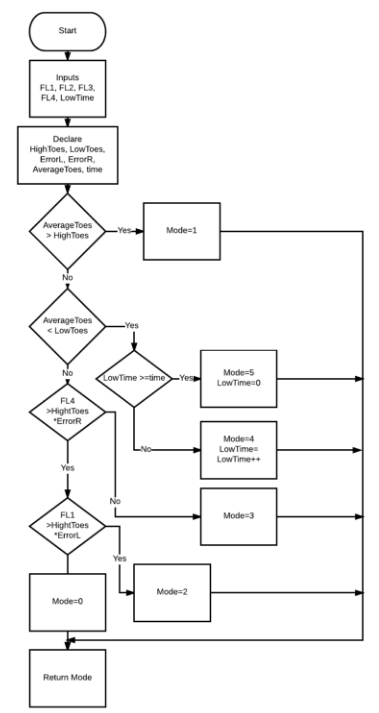
Mode Chooser Flow Chart
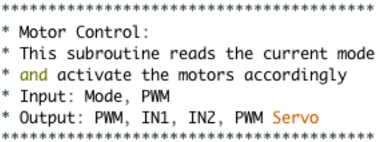
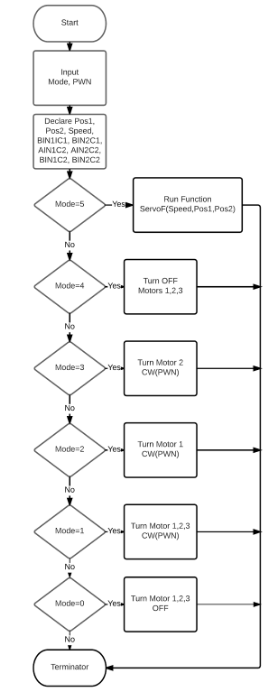
Motor Control Flow Chart
Servo Positioning Flow Chart

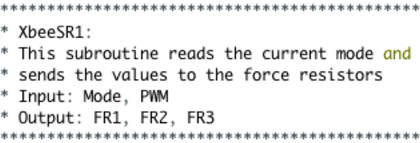
Xbee Flow Chart

Hardware Design
by Manufacturing and Design Engineer | David Mendoza
Link to Final Prosthetic Hand Palm Design Blog Post:
Link to Final Prosthetic Hand Fingers Design Blog Post:
Verification Tests
by Mission, Systems, and Test Engineer | Chris Bautista
Link to Verification & Validation Report – Prosthetic Hand:
System Resource Reports
by Mission, Systems, and Test Engineer | Chris Bautista
Power Allocation

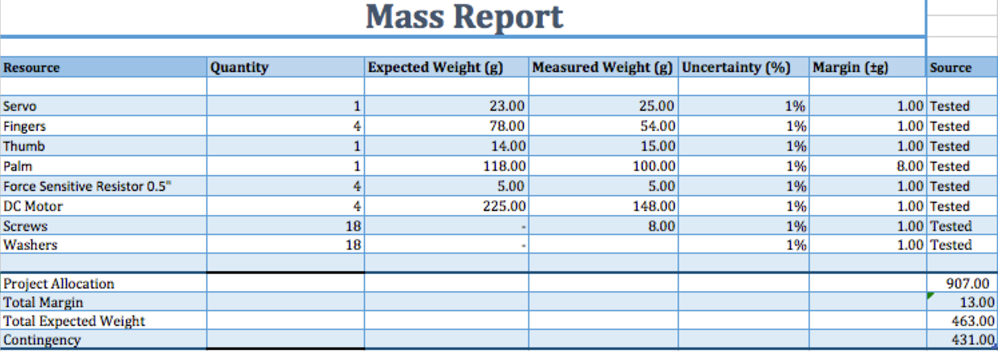
Mass Allocation
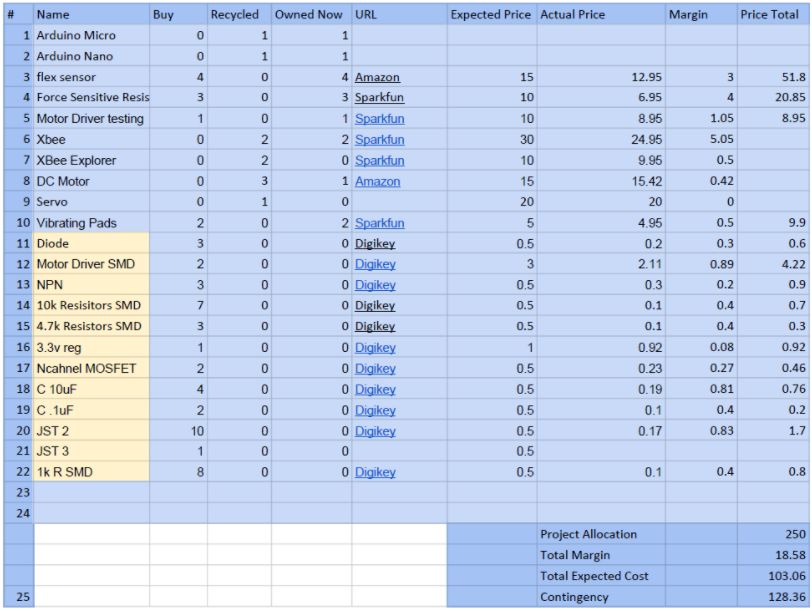
Cost Allocation
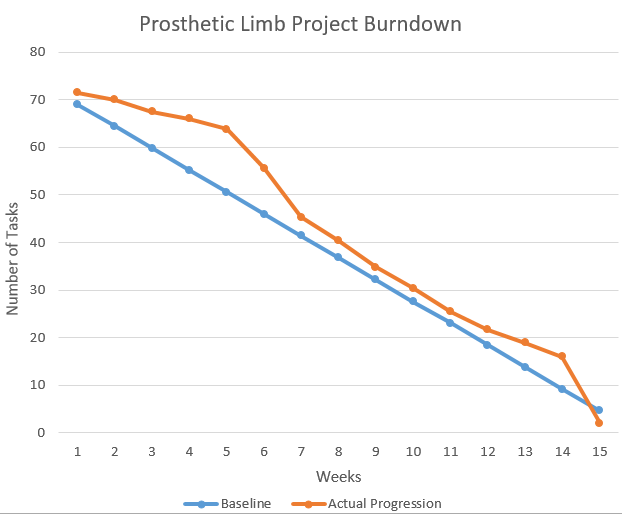
Burndown
by Project Manager | Bianca Esquivel
Project Resources
Project Video: Prosthetic Limb 2017 Project Video
CDR PowerPoint: Prosthetic Hand CDR PPT
PDR PowerPoint: Prosthetic Hand PDR PPT
Project Libre & Excel Burndown: Prosthetic Limb Schedule & Burndown
Verification & Validation Report: V&V Prosthetic Hand
Solidworks Files: Mechanical Blog Post 1, Mechanical Blog Post 2
Fritzing Files: Electrical Blog Post 1, Electrical Blog Post 2, Electrical Blog Post 3
Eagle CAD Files: Electrical Blog Post 4
Arduino Code: Software Blog Post
Bill of Materials: Prosthetic Hand Reimbursement Form
The Entire 400D Prosthetic Limb Folder: Prosthetic Limb 2017 Group Folder