{kind=link}
Spring 2017 SpiderBot – Cable Tree Design
By: Jefferson Fuentes
Requirements:
The Spring 2017 3DoT Spiderbot, S-17 Spider, is required to utilize the program assigned 3DoT board for processing and control. In addition, S-17 Spider must utilize a custom PCB design for mission objectives.
Introduction:
S-17 Spider utilizes the program assigned 3DoT Board (Fig. 1), featuring an ATmega32U4 Microcontroller. The 3DoT is prefabricated and designed to provide connections and control to two 5V DC motors, two 3.3V Servos, and an I2C port for expansion capabilities. S-17 Spider will be using the two available motor connections, one servo connection, and the I2C pins for an external custom PCB. The external PCB will be powered via 3.3V supplied by I2C and will be used to control a third DC motor. The following will provide insight into S-17 Spider’s wiring layout, or “Cable Tree”.
S-17 Spider can be summed up in a system block diagram (fig. 3 & 4), demonstrating the projects functions and how connections are implemented. From SBD, a total of 13 wires, 11 from 3DoT and 2 from PCB, will be used in the project. Each of the three motors will incorporate a twisted pair technique to minimize noise and keep the keep wires traceable, connected to JST terminals. The servo is hardwired and connected to JST terminals. The I2C connection between the 3DoT and external PCB, consisting of 4 wires, will remain consistent in the color choice of the wiring to allow easier traceability, and will use.

Figure 1 – 3DOT board.
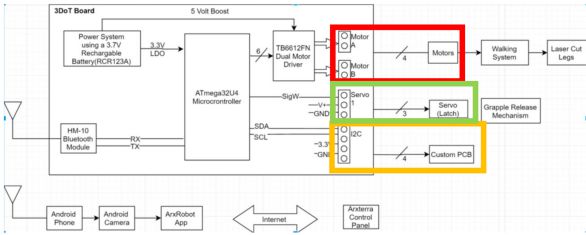
Figure 2 – System Block Diagram

Figure 3 – PCB System Block Diagram
Process:
“Cable Tree” planning first begins with a sketch (fig. 3), which follows the system block diagrams for the S-17 Spider project. The sketch represents a rough draft of a propose cabling system to serve as a reference for a 3D rendering (fig. 4) as well as reference table for cable colors (table 1). These are the building blocks for the final S-17 Spider Project build.
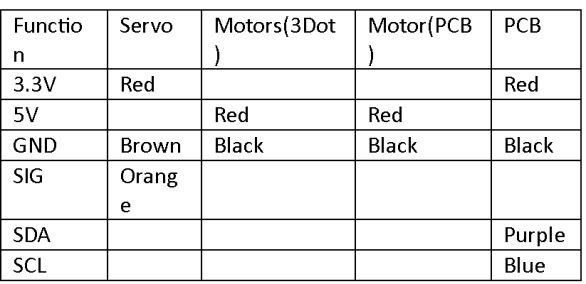
Figure 4 – Wiring Color Diagram
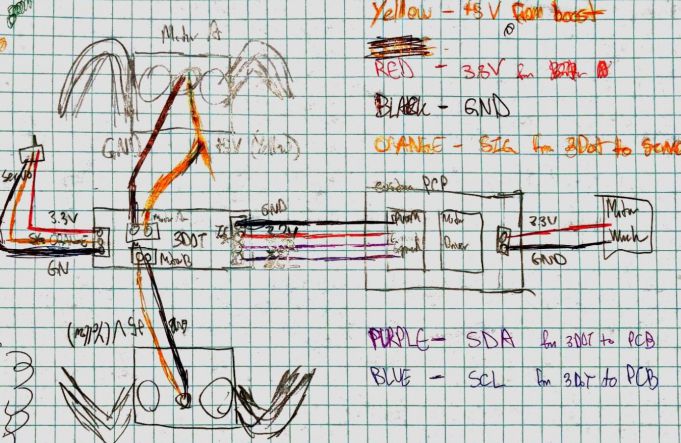
Figure 5 – Wiring Sketch
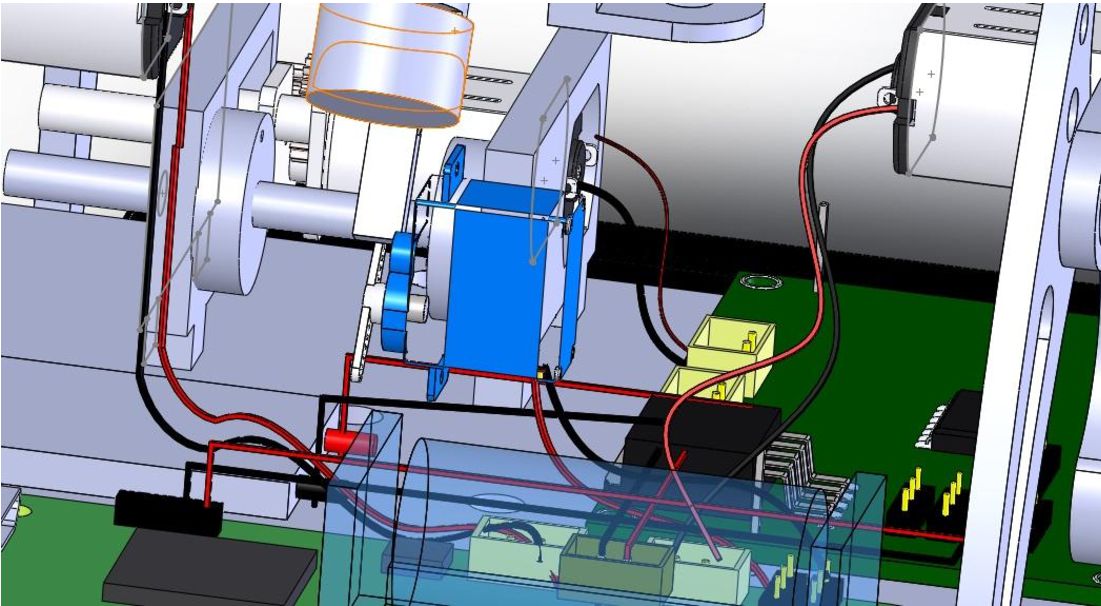
Figure 6 – SolidWorks 3D Rendering