{kind=link}
Spring 2017 SpiderBot – Custom PCB COMPLETED AND TESTED!!
Table of Contents
By Nicholas Jacobs – Project Manager
Introduction
The 3DOT controller is a minimalist board. It comes equipped with a two channel motor driver that drives SpiderBot’s two DC motors at 5 volts, leaving nothing to drive SpiderBot’s 3.3v winch motor. Our custom PCB incorporates an additional motor driver and PWM expander that enable I2C serial communication between the custom PCB and the 3DOT controller.
Requirement
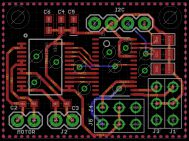
SpiderBot shall incorporate a custom PCB. The PCB will consist of a PCA9685 PWM expander and TB6612FNG H-Bridge motor driver to drive a 6v Metal Gear dc winch motor at 3.3 volts.
Design Iterations
Despite shaving a lot of unnecessary weight off of SpiderBot, a problem still persisted. Operating the winch motor at 3.3 volts resulted in a 5 minute ascent time to the anchor point. After consulting with Shaun and Thomas, the E&C engineer and E&C division manager, I made the decision to run the winch motor at 5v which drastically improved the ascent time of SpiderBot. The only modification to the custom PCB was the addition of a 5 volt LDO.
When this design was presented to the customer, he rejected the idea of running the winch at 5v. He specified that there was no requirement in the Program Objective that prompted the need to run the winch motor at 5 volts- basically there is no need for SpiderBot to ascend fast. Hearing this, I pulled our PCB files in order to revert back to the winch being driven by 3.3 volts.
Once the design files were approved for fabrication, the Gerber files were created using the SparkFun CAM processor. These files allowed for the PCB to be constructed, allowed for the creation of the solder stencil, and solder paste from Osh Stencils. Osh Stencils has a very easy user interface to work with, the only gerber file that is need to create a stencil for your board is the .gtp file.
Bill of Material (BOM)
Eagle CAD has a ULP or User Language Program that will generate a complete list of materials used in either the schematic file or board file. Open Eagle CAD and the schematic of whatever BOM you want to create. In the taskbar enter BOM.ulp and press enter. If you get an error of some sort, just go to file -> Run ULP -> then select BOM. A window will pop up and under List Type select ‘parts’ and ‘file type’ select .csv, and save to well known location. This file type can be opened using Excel.
Open this .csv file from Excel, you may have to change the file type from ‘All Excel Files’ to ‘ All Files’ in order to see the .csv. When found double click to open. When this file loads it will look messy and Excel may ask you to save it as a different file type, maybe an .xls. To organize the data select the entire ‘A’ column and navigate to the Data tab, then under Data Tools click ‘Text to Columns’. When the window pops up make sure ‘Delimited’ is selected click next. Even though the file type is .CSV, which stands for ‘comma separated values’, in the delimiter section check the semicolon box. In the preview box below it, you’ll see the data begin to clean up. Click finish, and all your data should be organized.
![]()
Assembly and Soldering
Once the boards were received, plans were made to solder the components using a microwave oven, a solder stencil, and solder paste. The first step is to adhere the solder stencil over the PCB in such a way that only the SMD pads are exposed. This will allow for the solder paste to only be applied to the component pads.
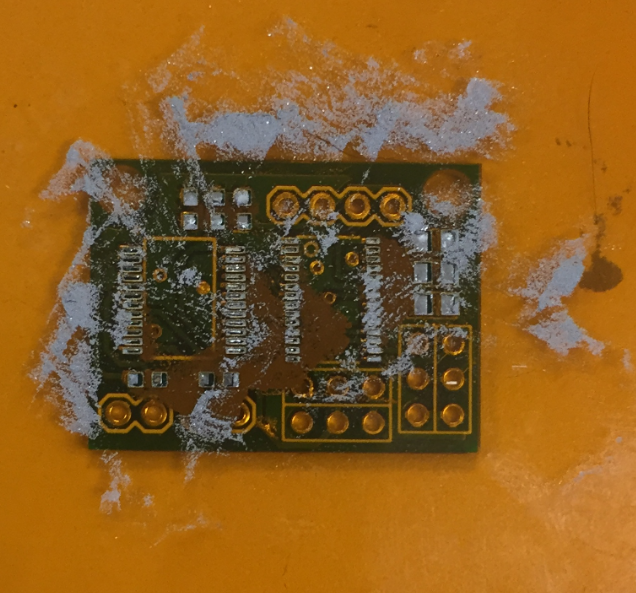
Once the solder paste is applied, the components are very carefully placed in their respective spots on the PCB. Before placing in the oven, the oven was preheated to 300 degrees Fahrenheit. The board was then placed in the oven, allowing for a gradual temperature acclimation. After about 90 seconds, the heat was increased to about 450 degrees Fahrenheit to melt the solder paste. Once the solder reflowed, the oven was turned off and the board was removed from the oven for cooling.
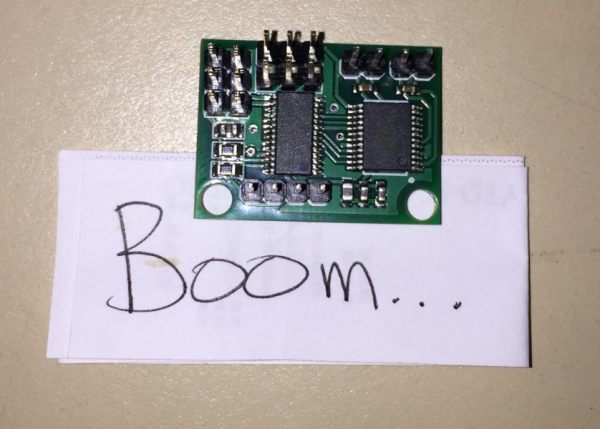
Testing
Code used to test PCB utilizes the Adafruit Motor Driver v2 library. Since the device communicates over I2C, the Wire.h library is also included.
The first step is to instantiate the motor shield object as seen on line 16. Since our PCA9685 IC has pin a5 pulled to Vcc, the address has been changed to 0x60.
After instantiating our motor shield object, we then need to tell the board which motor we are trying to drive, either motor 1 or 2. For testing, we have made two motor objects so that both motors can be tested.
Setup:
Start with Serial.begin(9600) so that we can output onto the serial console for debugging purposes.
AFMS.begin(); takes care of the I2C protocol such as Wire.begin, etc.
In order to be able to control the motor driver, the standby pin needs to be pulled high. This is done by using AFMS.setPin();
After, STBY has been enabled, we can now use the library to drive either motor by calling the object and speed function, and then calling the object and run function.
Example:
myMotor->setSpeed(255); //sets motor1 for full speed in our code.
myMotor->run(FORWARD); //tells motor 1 to run forward