Spring 2017 SpiderBot – DC Motor Noise Experiment
Table of Contents
By Nicholas Jacobs – Project Manager
By Shaun Pazos – E & C
Problem
Bluetooth wireless communication is subject to massive amounts of interference because of the high-volume traffic on the 2.4 GHz frequency band, and is also subject to the noise generated by DC motor voltage spikes from each commutator as the shaft turns. This added noise is believed to prevent Bluetooth connections from happening, and the chief reason for connection losses.
Procedure
Using a solderless breadboard and one GM3 DC motor, 5 volts was applied to the terminals of the DC motor. Configuring a Tektronix TDS 210 oscilloscope in the XY display mode allows a user to generate a plot where one input is displayed on one axis and the other input is a function of the other input probe. While in this mode, I only measured one input in order to best measure the amplitude of the DC motor noise across the motor terminals. Setting the input to be displayed on the y axis with no signal on the x-axis, will only display the vertical portion of the signal.
Results
This experiment was completed using three different ceramic capacitor values at a time, no capacitor, 0.1uF, 1uF and a 10uF.
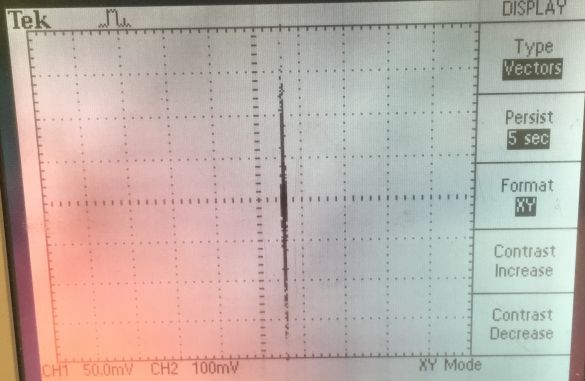
No capacitor across motor terminal.
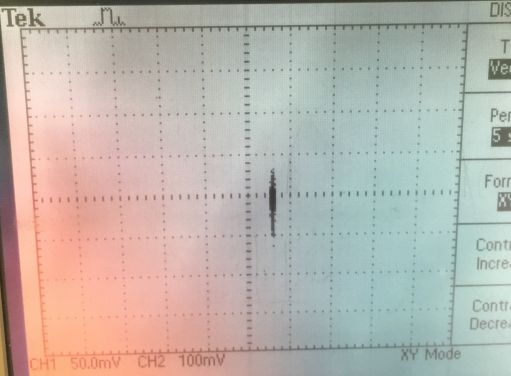
0.1uF capacitor across motor
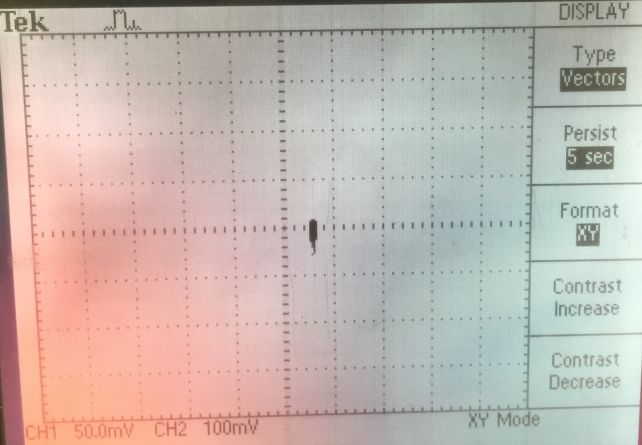
1uF capacitor across DC motor
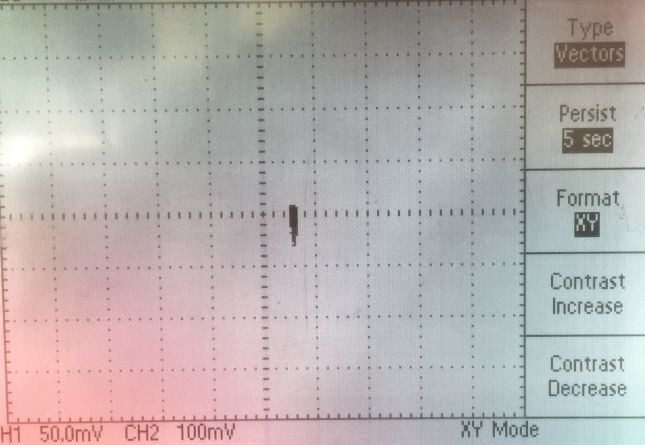
10uF capacitor across DC motor
We switched back to the XT input display mode. This measures one input signal versus the time axis (X). This displays the noise fluctuations over time.
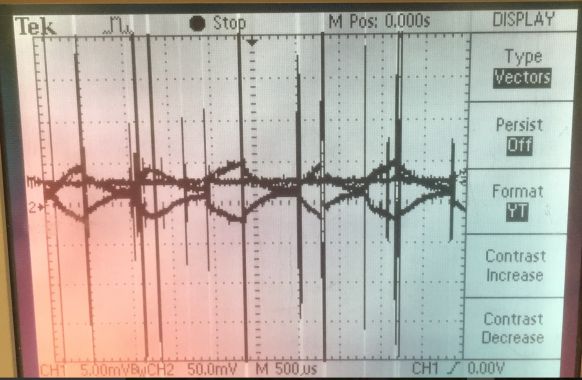
Noise across DC motor as function of time with no capacitor.
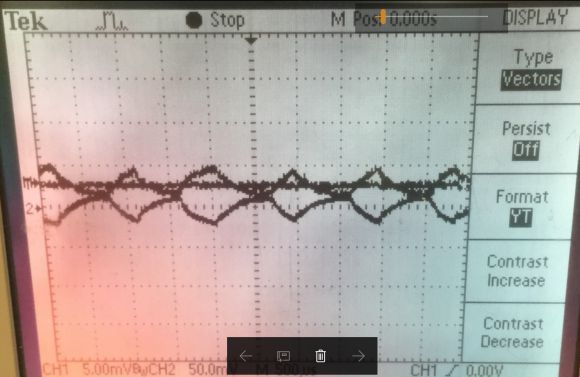
Noised suppressed with 1uF capacitor.
Conclusion
As we can see, adding a 1uF capacitor across the motor terminals significantly reduces the amount of noise generated from the DC motors. This discovery was implemented into our custom PCB design to reduce the same noise generated by our motors.
Adding capacitors isn’t the only way to reduce the amount of noise in SpiderBot’s design. Pololu wrote an article that suggests 3 additional ways to suppress and prevent noise intrusion such as twisting the motor wires which has also been implemented into SpiderBots design.