{kind=link}
Spring 2018 3DoT Hexy: Mock-Up Motor Power Under Load and Power Estimate of Micro Metal Motors
By: Kris Osuna (Electronics & Control Engineer) & Raymundo Lopez-Santiago (Mission, System, and Test)
Verified by: Eduardo De La Cruz (Project Manager & Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Table of Contents
Introduction
This blog post covers two test cases conducted with two different sets of motors. The first set of two unidentifiable model number DC motors were obtained from Professor Hill’s resource cabinets. The second set of motors include two DFRobot FIT0481 micro metal gear motors to be used for our 3DoT Hexy project. For both test cases, current and voltage measurements were obtained using an Arduino Uno and a INA3221 Breakout Board. The current measurements is our power test since we are planning to add up all currents to make sure we do not exceed the 650 mAh battery (1300 mA) allowed from the project. Tests also involved using the EE370L Parallax board to measure RPM of the motors at various voltages. Measurements were taken with a load that is half the weight of 3DoT David (66.3g) and the gears in motion. Apart from conducting test with both sets of motors, an additional test with 3DoT David’s motors (Micro Gearmotor – 900 RPM (6-12V))) was performed. Tests conducted include a no load and mock up under load test. Under the no-load test, the motor spun with no gears attached. Under the load conditions, the motor spun with gears in place and legs attached (half of 3DoT David’s gear system).
Components Needed
- Scale
- 3DoT David
- 4 micro metal gear motors
- INA3221 breakout board
- Arduino Uno
- Opto-Reflective switch
- 2 NPN transistors
- Resistors: 100Ω, 200Ω, 1kΩ
- Process Control Student Guide by Parallax INC
Information on motor tested from 3DoT David’s drive train system: Link
Information on motor purchased for 3Dot Hexy: Link
No datasheet is available for motors obtained from Professor Hill’s resource cabinets.
Related Requirements
- The micro metal motor must be able to turn six gears
- The motor must be able to work in the 3.6-5V range
- The motor must have an RPM of at least 360 with a 66.3g load
Test
The tests involved using the EE370L Parallax board to measure RPM of the motors at various voltages. Activity 6 in the Lab manual (EE370L_Manual) was replicated but instead of a fan, the motor above was used. A half black/half white circle was used for the RPM test (See Fig.2).
A riser was placed on the scale and tared so that we can weigh 3DoT David shown in Fig. 1. 3DoT David weighs a total of 132.6 grams. There are two micro metal motors used so each motor will have a load of 66.3 g. The original motor from the 3DoT David project was removed. The motors were connected to the INA3221 breakout board to measure current with no load. Set up can be seen in Fig. 2. RPM was calculated by using the opto-reflective switch to read the black marked paper on the sheet attached to the motor as the motor spins. The opto-reflective switch has an IR LED and phototransistor which is able to differentiate the black and white part of the paper. Each count means a full rotation was achieved. The motor shaft was marked black and recorded for 10 seconds then played in slow motion to confirm that the opto-reflective switch readings were correct. This test was done to also both sets of motors.
The two sets of motors being tested were replaced inside the 3DoT David gear system. This is done so that the gears moving would be part of the load (See Fig.4). The motors are connected to the INA3221 breakout board to measure the current while dealing with the load. RPM was calculated by using the opto-reflective switch to read the black on the sheet taped to the gear attached to the motor (See Fig. 3). The gear attached to the motor was marked, recorded for 10 seconds and watched in slow motion to confirm the opto-reflective results were accurate. Below are tables with results obtained with each motor at no load and with a load which includes half of 3DoT David’s gear system. Half of 3DoT David’s gear system consists of (3) 30:1 gear ratio gears and (2) 10:1 gear ratio gears. Graphical representation of all measurement results is shown in Fig. 5, 6, and 7.
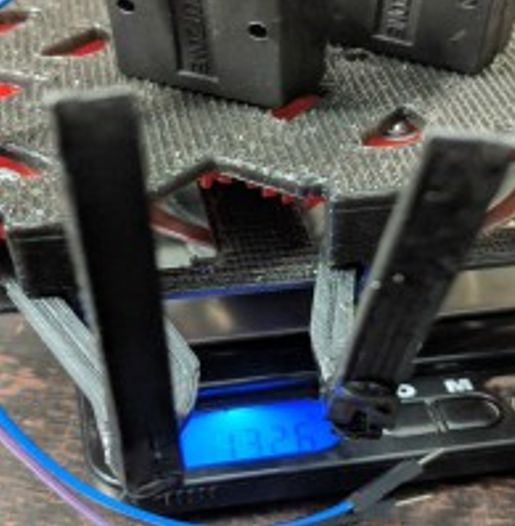 Figure 1: Measuring 3DoT David’s Weight
Figure 1: Measuring 3DoT David’s Weight
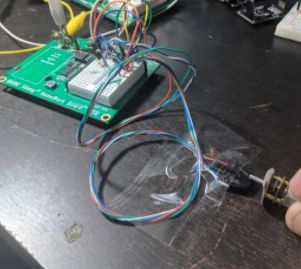
Fig. 2: RPM test with no load

Fig. 3: RPM test with load
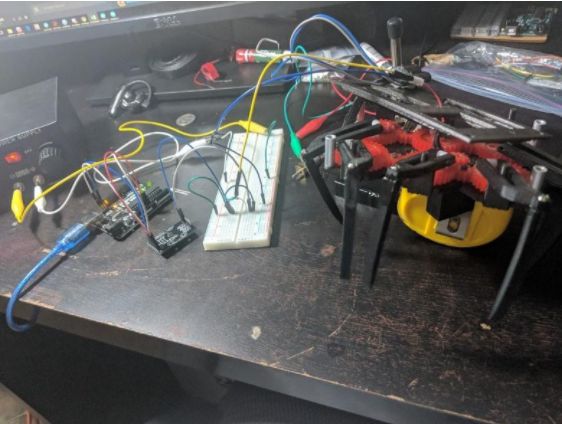
Fig. 4: Voltage and current measurements with load (half of 3DoT David’s gear system)
Results

Table 1: Measurements of cabinet motors at 3.7 V

Table 2: Measurement of cabinet motors at 5 V
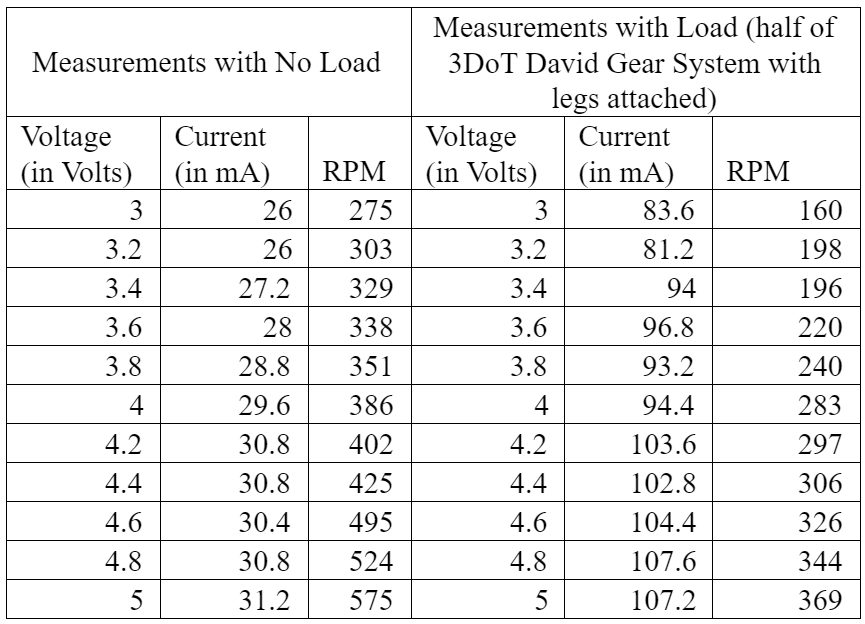
Table 3: Table showing measurements with load and no load from 3 to 5 volts for motors from 3DoT David. (No stall exists with no load. Stall exist with load at 2.3 V)
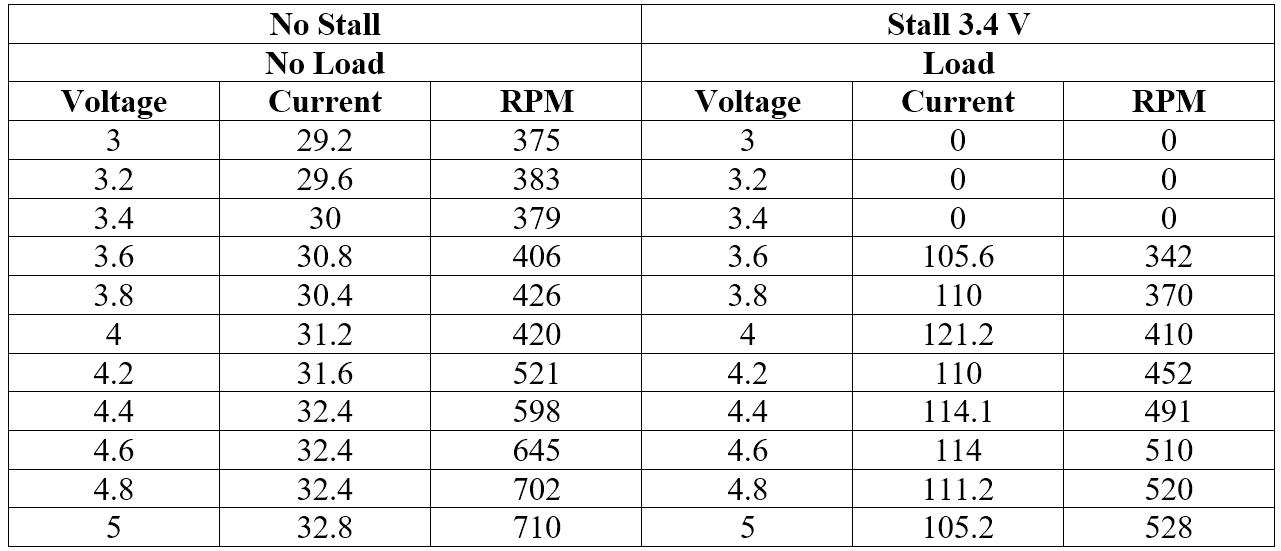
Table 4: Measurements of our purchased motors (FIT0481) (voltage in Volts, current in (mA))
When a load is attached to a motor, it is expected to see a rise in the current draw since the motor works harder and furthermore increases torque and inversely has less rotational speed. This is what the measurement results show from Fig. 6. We can conclude that since the motor stalls at 2.3V with load, we need to drive the motor at a higher voltage. Based on the results at 5V with load, we get a significant motor speed with a reasonable current draw.
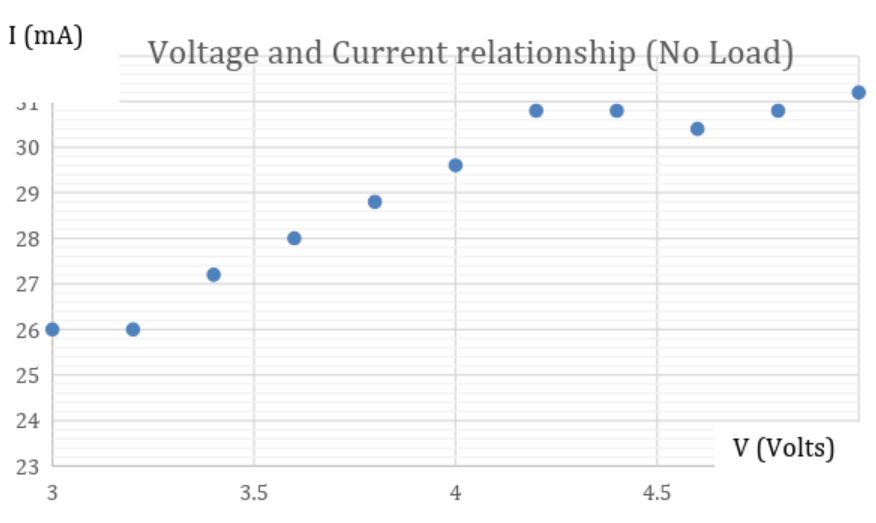
Fig. 5: Graphical representation of motor with no load at voltages between 3 to 5 volts for motors from 3DoT David.
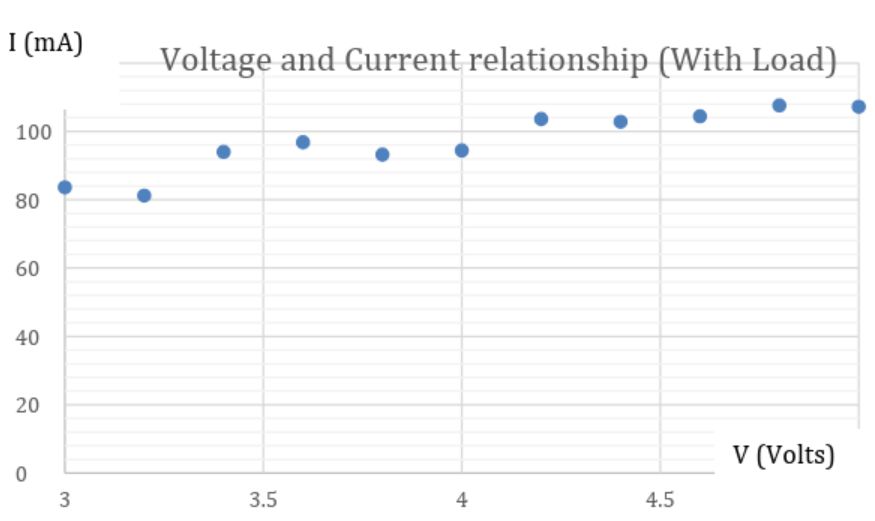
Fig. 6: Graphical representation of motor with load at voltages between 3 to 5 volts for motors from 3DoT David.
The following graph is for table 4 which uses the purchased micro metal motors that will be used on 3DoT Hexy.
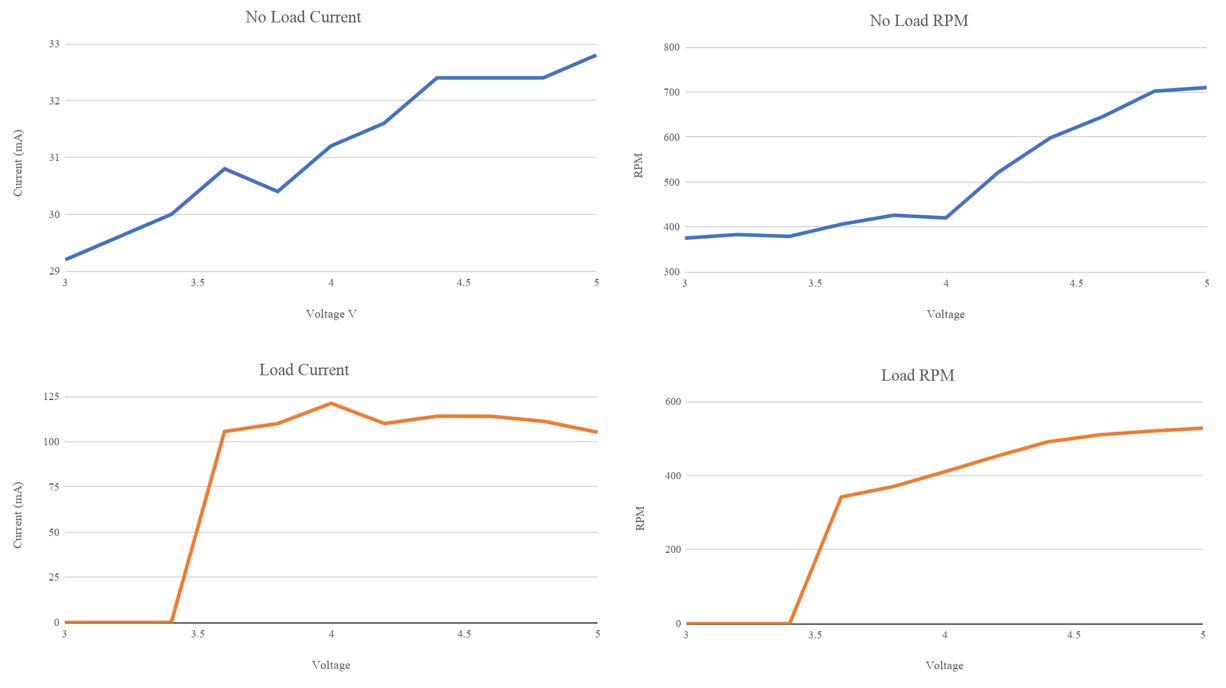
Fig 7.: Graphical representation from our purchased motors (FIT0481)
Conclusion
Factors for choosing the best-brushed motor for 3DoT Hexy included cost, size, voltage rating, and speed-torque relationship. Based on tests performed and since we are using a similar gear system from 3DoT David, it was concluded that a motor rated at 6V at no load speed of 530 RPM ( Link) will provide enough torque to drive the 3DoT Hexy’s gear system and legs. We will be using this motor at 5V and expect to have enough torque and rpm with the load. The purchased motors stall at around 3.4 V with a load, because of this it means that we can use can use the 3.7V to our motors provided by the 3DoT board. We are waiting for 3DoT Hexy to be 3D-printed to decide whether we will need 3.7V or 5V power to our motors. Once we find the full weight of 3DoT Hexy with all the sensors attached we should run another power study. The new power study will be more realistic because 3DoT Hexy will be moving and have all the sensors workings. If 3DoT Hexy can take the full load without the motors stalling at 3.7V we would only need one buck booster for the UV LEDs.
Resources
 Figure 8: Micro Metal motors obtained from resource cabinets
Figure 8: Micro Metal motors obtained from resource cabinets
 Figure 9: Purchased Micro Metal motor
Figure 9: Purchased Micro Metal motor