{kind=link}
Spring 2018 3DoT Hexy: Product Breakdown Schedule
By: Raymundo Lopez-Santiago (Mission, System and Test)
Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Introduction
This blog post covers the Product Breakdown Schedule (PBS) for 3DoT Hexy. This document follows the Work Breakdown Schedule (WBS) developed by Eduardo De La Cruz (Project Manager and Manufacturing Engineer). This PBS is split into five sections to outline the major components of 3DoT Hexy. The five sections are electronic hardware, software, movement, manufacturing, and power. Anything for movement which includes motors, joints, gears, and legs are the main parts in for mobility of the robot. Under the software section, communication via Bluetooth from a smartphone and the Arxterra app will allow for wireless control of 3DoT Hexy with custom commands. For electronic hardware, all peripheral sensors will be connected to a custom PCB. Sensors used for this project include three UV light sensors which will aid in detecting intersections, an ultrasonic sensor which will aid in detecting other robots, and a gyroscope to aid in directional turning. For manufacturing, it includes designing a cam system. chassis, legs, joints and any other parts used for the mechanism. It also includes rendering models on Solidworks and 3D printing parts in either PLA/ABS plastic or other approved material. For the power section, 3DoT Hexy and its peripherals will be powered by a single 3.6V RCR123A battery. Power estimates of each components are further listed in the resource reports blog post.
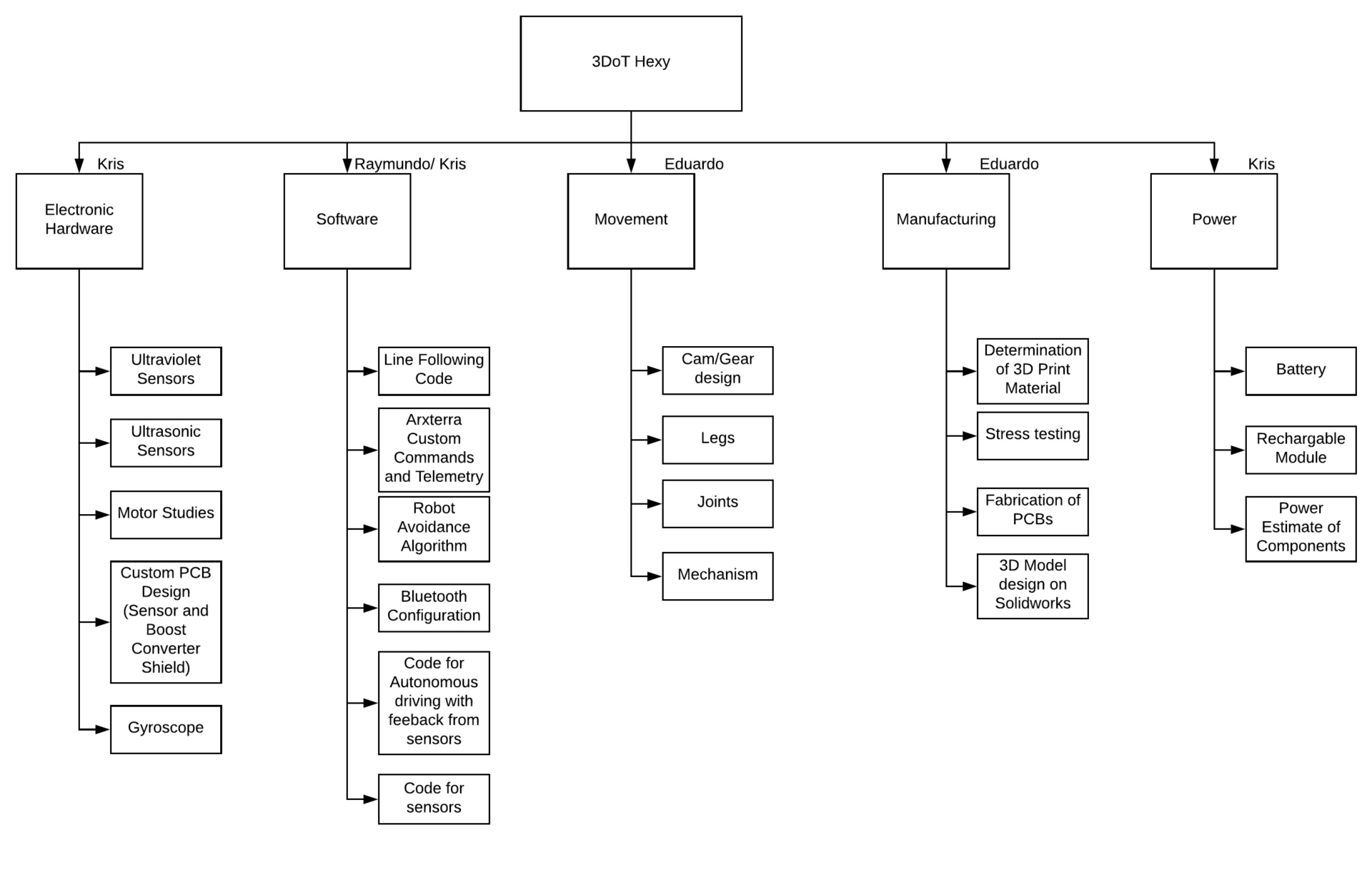
Fig. 1: 3DoT Hexy Product Breakdown Structure
Conclusion
After going through two revisions after the PDR, I made sure this PBS was effective in following the WBS. For future reference, make sure to only define major components for the robot and not specific details. Do not try to go to a different path than the WBS, since the overall objective is to identify major components and who is responsible for them to further help with the production of the final product.
References
- https://www.arxterra.com/2016-spring-3dot-david-final-project-blog-post/
- https://docs.google.com/document/d/18vVkXfxwqulRn5qCdm2Y6NYleS1iGQ_p3y6FJUj5NJ4/edit