{kind=link}
Design – First Iteration
By Simon Abatay, 3D Modeling and Manufacturing
After a review with the Robot Company’s President, the initial tibia design was deemed unsatisfactory due to its flat nature. In order to tackle this, I decided to modify my original design to give it a more 3-dimensional appearance. My intentions with this modification step were to maintain some semblance of its original shape, while providing it with a newfound presence of solidity.

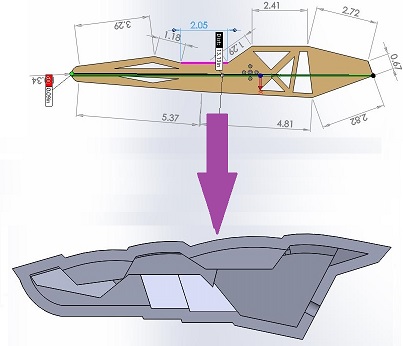
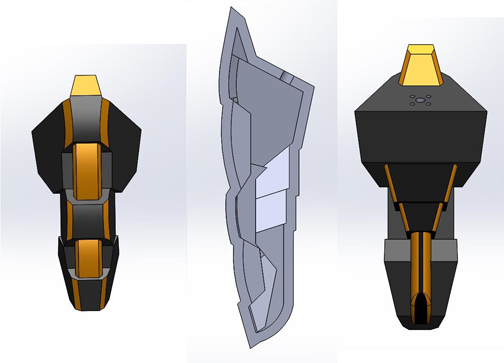
The picture above shows that there is a defined depth in all 3 axes of the tibia. This satisfies the 3-dimentional objective. The tibia still retains its 7 inch height and has a shape similar to the initial design to satisfy the height requirement. In order to save weight, the inside of the tibia will be slightly hollow. The overall design will be constructed with enough material to retain the structural integrity of the tibia despite its hollowness. Below is an image of multiple views of my tibia design:
To test the quality of the design, I put it through a proper stress simulation in Solidworks©.

The green arrows in the image above show where the tibia will garner most of its support. The purple arrows represent where the external forces are being applied to the design. I chose to apply force in every possible direction against the bottom of the tibia. This was done in order to simulate the idea of the spider walking, since that motion is the time when tibia undergoes stress in all directions. The spectrum to the right of the picture shows the level of stress each section is undergoing. The stronger the section the more blue it is, and the weaker the section, the more orange and red. This simulation shows that when the tibia undergoes 50 Newtons of force in each direction, it can retain its shape with minimal deformation. This simulation shows that the tibia’s structure is sound.