{kind=link}
How to replace metal gears and burnt circuit board from broken servos
By Tien Dang
Introduction
During the project (hexapod), we broke total of four servos. After observation and analysis from the broken servos, we able to detect and identify two problems of how the servos were broke down, while the servos are running. First problem we encountered is overload in power, and the second problem is overload in weight. So we took some time looking inside of the broken servos and found few solutions way to fix them.
What does inside of a servo look like?
Servos usually contain three parts (metal grinding gears, motor and circuit board)
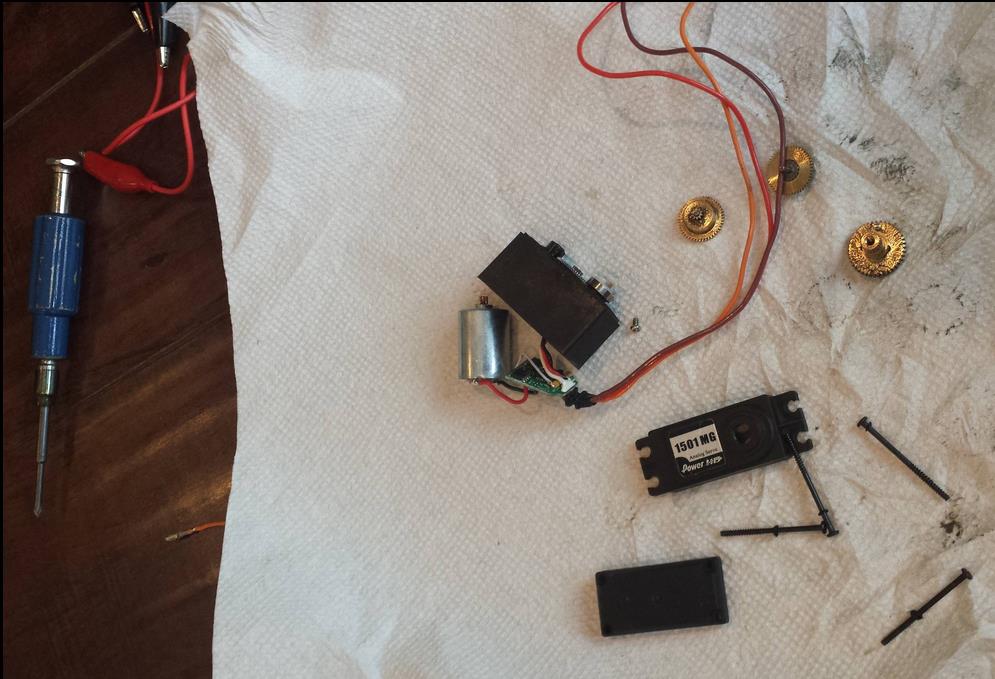
Figure 1: Take apart servo with a screwdriver

Figure 2: Metal gears

Figure 3: Motor and circuit board
How to fix broken servos?
To detect which problem servo met, we connected the servo to the board as we testing the servo.
- Power overload
This problem is usually meet when we first buy the servo and test right away without adjust the voltage to 6V or limit the current that goes by the servo.

Figure 4: Circuit board inside the servo
For the power problem, three cables (black, white, red) will usually falling off from the soldering node or the chip is tanned. If the soldering parts are failing off, simply re-soldering it, if the chip is burnt, we have no choice but to replace the whole board (use the broken gear servos to exchange the board)
2. Weight overload
This problem usually occurs when the team is testing the hexapod movements (forward and backward). The weight distribution usually does not equal for each legs, all of the weight will be putted on the back legs (which simply cannot create enough force to push the whole body moving forward). This will result into two problems. One is current over-drain, and the other is broken gears metal.
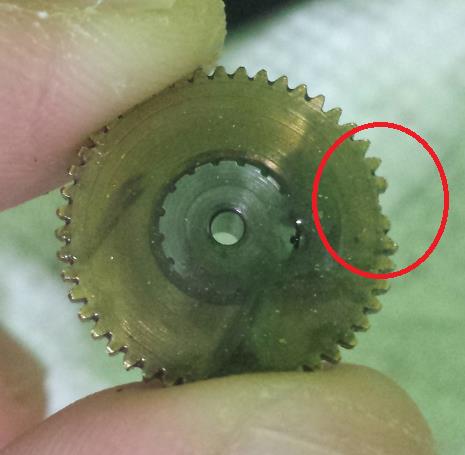
Figure 5: Broken gear metal
For the current over-drain problem, we can repair it by using the same methods as power overload. For the broken gear metal, we need to replace the gear. We can buy the new metal gears online at the website http://www.amain.com/advanced_search_result.php?keywords=metal+gear&x=0&y=0. Then we can exchange the broken gear with the new ones. Instead of paying $12.50 to buy a new servo, this method will save a lot of money since one metal gear only cost $0.99 up to $4.99 compared to $12.99.
Conclusion
After looking inside four broken servos, I was able to exchange metal gears and burnt board for two of the servos. They are working and running smooth like a brand new servo. In case if we stumbled into this problem again while demoing the project, I will be able to dismantle the servo apart less than 5 minutes and exchange the broken parts without taking the whole hexapod apart (like we did from beginning). Save time and money!
Here is the picture that I replaced and exchanged metal gear without take apart or re-wiring the robot.
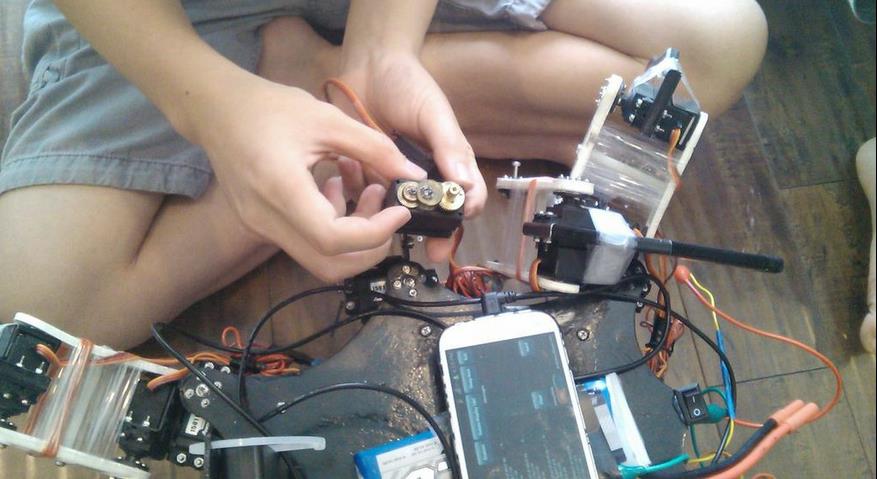
Figure 6: Exchanging the broken metal gear for one of the leg.
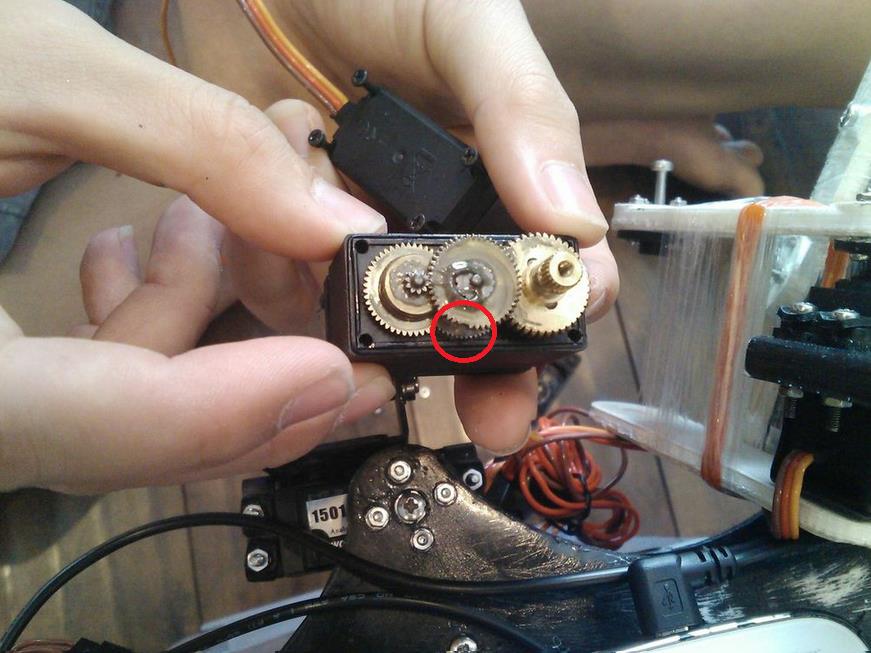
Figure 7: Broken metal gear in middle leg’s servo