Velociraptor (W)

Spring 2017 Velociraptor: Fritzing Diagram
Table of Contents Authors By: Mohammar Mairena (Electronics & Control Engineer) Approved By: Jesus Enriquez (Project Manager) Introduction Before one can create a custom printed circuit board (PCB), one has to create a Fritzing diagram. A Fritzing diagram is a virtual electronic circuit that is modeled after a circuit tested on the breadboard. Fritzing is […]

Spring 2017 Velociraptor: RGB Color Sensor
Table of Contents Authors By: Mohammar Mairena Approved By: Jesus Enriquez Introduction The Velociraptor will compete in a game similar to Pacman. One of the requirements is that the Velociraptor shall attempt to collect as many red dots as possible while navigating the maze utilizing either a static or dynamic walk. As a result, we […]

Spring 2017 Velociraptor: SolidWorks Hardware Design Model
Table of Contents Authors By: Andrea Lamore (Manufacturing) Approved By: Jesus Enriquez (Project Manager) Introduction Throughout the engineering design process, the SolidWorks model for the Velociraptor went through a series of changes as our team went through trial and error with the different components for the robot. This post includes some of the thinking that […]

Spring 2017 Velociraptor: Servo Torque Test
Table of Contents Authors By: Mohammar Mairena, Electronics & Control Engineer Approved by: Jesus Enriquez, Project Manager Introduction The torque needed to move the different parts of the robot are specified by the Design and Manufacturing engineer. By testing the torque required at a specific location of the robot, one can prove the servo chosen […]
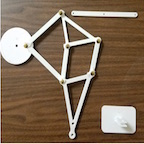
Spring 2017 Velociraptor: Range of Motion Prototype
By: Andrea Lamore (Manufacturing) Approved By: Jesus Enriquez (Project Manager) Table of Contents Introduction The range of motion of the leg determines the type of step the robot will take. A static walk requires a different stride from a dynamic walk and it is important to pick the linkages in the leg according to the […]

Spring 2017 Velociraptor Preliminary Project Plan
Project Team: Jesus Enriquez (Project Manager) Oscar Ramirez (Mission, Systems, & Test) Mohammar Mairena (Electronics & Control) Andrea Lamore (Manufacturing) Table of Contents Work Breakdown Structure By Jesus Enriquez (Project Manager) The figure below shows the Work Breakdown Structure for the Velociraptor project splitting the responsibilities and tasks of each member within their respective division. […]

Spring 2017 Velociraptor Preliminary Design Documentation
Velociraptor Team: Jesus Enriquez (Project Manager) Oscar Ramirez (Mission, Systems, & Test) Mohammar Mairena (Electronics & Control) Andrea Lamore (Manufacturing) Table of Contents Program Objective/Mission Profile By Jesus Enriquez (Project Manager) The Velociraptor Biped, inspired by that of the Titrus-III model developed by the Tokyo Institute of Technology, is to meet customer expectation through demonstration […]

Fall 2016 Velociraptor (W): Final Project Document
By Lam Nguyen (Project Manager) Table of Contents Executive Summary of Project Project Objectives For CSULB Fall 2016 semester, the Velociraptor biped robot project will branch off to a new species of dinosaurs and set up a new baseline with the Theo Jansen robot design. The Velociraptor is to be a toy robot resembling a […]

Fall 2016 Velociraptor (W): Analog to Digital Converter
By: Taylor Farr (Electronics and Control) Approved by Lam Nguyen (Project Manager) Table of Contents Introduction I chose to use the Adafruit ADS 1015 analog to digital converter. This will be used to convert the analog signals from the rotary converter to digital ones. This ADC communicates via I2C, so this satisfies our level 2 […]
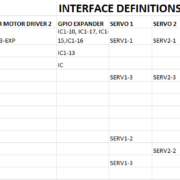
Fall 2016 Velociraptor (W): Interface Matrix Update
By Gifty Sackey (Mission, Systems, Systems Engineer) Approved by: – Lam Nguyen (Project Manager) – James Lee (Division Manager for Mission, Systems, and Test Table of Contents Introduction In this current block post, the interface matrix along with the eagle card documents have been provided and discussed in order to allow future 400D students to […]