3DoT Chassis

Pete-Bot – Troubleshooting the GM6 Motors
Written by Zachary de Bruyn Troubleshooting Results During the integration of the peripheral devices it was discovered that the GM6 Motors did not operate accordingly. When the motors were inserted into the JP2 and JP3 ports of the 3DoT board, the motors would not operate with the provided code designed to test the GM6 Motors. […]
Pete-Bot Integration and Testing
Written by Zachary de Bruyn Table of Contents Setup Upon receiving the 3DoT v5.03, the planned peripheral devices were installed and initiated onto the board. The below table displays the ports associated with the 3DoT board, and which pins were connected to the respective peripheral device. Example, the VCC and GND of JP2 are associated […]
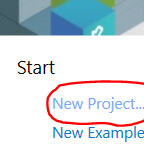
Adapt C++ 3DoT Mission Code to SAMB11
Written by Zachary de Bruyn Table of Contents Purpose The purpose of this post is to instruct how to implement the 3DoT code for the SAMB11 MCU. Unfortunately, the SAMB11 is not supported by such a large community like that of the ATMega32U4. There is also not built in functions like there are for Arduino […]

Pete-Bot Paper Shell
Written by Elizabeth Nguyen (Project Manager) Objective Pete-Bot requires an outer paper shell that covers the chassis. Its image should have a likeness of CSULB’s mascot Prospector Pete. Template Provided by Professor Hill was a template to create a concept art for the Pete-Bot paper shell. The original image is of Optimus Prime. Challenges There […]
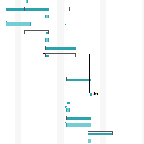
Project and Planning Schedule
Written by Elizabeth Nguyen (Project Manager) Objective The objective of the planning and schedule task is to compile a project schedule for EE 400D from start to finish. The schedule was made on Microsoft Project and can be used as future reference for EE 400D project planning. What I’ve described is the process I’ve taken […]
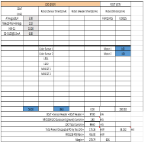
Pete-Bot Power Budget
Written by Melwin Pakpahan (Missions, Systems, and Test) Description The 3DoT Board contains key components that each draw current from the battery. The boost draws current directly from the battery and provides power to the LDO. The MST Division Manager created the power budget template which is modified for the Pete-Bot. The Pete-Bot will use […]
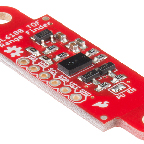
Ultrasonic Custom 100mil Male Connector
Written by Zachary de Bruyn Purpose The 100-mil male connector was necessary in order to incorporate an accessory item, such as a sensor, to one of the 3DoT boards headers. The ideal connector would allow all projects within 400D to utilize a “universal” connector to implement for their respective projects. Connector Elements The utilization of […]
Rapid Prototyping, Motor Assembly, and Print Optimization
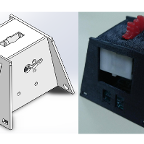
Written by Railan Oviedo (Manufacturing) Table of Contents Introduction For this semester’s version of Pete-Bot, the rapid prototyping process involved the verification of being able to fit the motors and the 3DoT board inside a single 3D-printed chassis piece. Furthermore, after confirming that the base design was suitable for fitting the motors and the 3DoT […]
Pete-Bot (P-Bot) Print Time
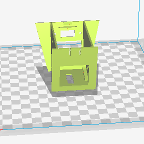
Written by Railan Oviedo (Manufacturing) Table of Contents Introduction For this semester’s version of the Paper-Bot (now dubbed “P-Bot”), one of the design requirements is to have the chassis 3D-printed as a single piece. After creating the 3D models, the approximate print time for the chassis are approximated through the use of Cura software. All […]

HM-11 Bluetooth Module Soldering
Written by Melwin Pakpahan (Missions, Systems, & Test) Description This post will cover the assembly of the HM-11 Bluetooth module onto the 3DoT board. This module allows Bluetooth communication between the Arxterra app on an Android phone and the 3DoT board. Pinout According to the 3DoT v5.03 schematic, the functional pins of the HM-11 module […]