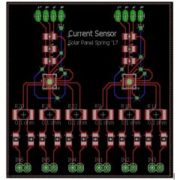
Solar Cell Current Sensing
By Edgardo Villalobos Custom PCB created by combining two INA3221 into one board. Table of Contents INA3221 Original Eagle CAD Custom PCB with 2 INA3221 Three INA219 = One INA3221 Description The INA3221 is a three-channel, high-side current and bus voltage monitor. It contains the setup of 3 INA219 single-channel, […]


Pathfinder Fall 2016 Final Summary
Table of Contents Project Overview By Sabina Subedi, Project Manager Project Objective The Pathfinder is an autonomous rover that is self-sufficient using solar panels. The design of the Pathfinder is inspired by the twin Mars rovers “Spirit and Opportunity.” The Pathfinder will utilize navigation waypoints on Arxterra control panel to traverse through the defined course, […]

Waypoint Navigation
Waypoint Navigation for the Pathfinder By Jose Alcantar, Electronics and Controls Engineer Introduction: This blog post covers the proposed waypoint navigation algorithm along with some issues regarding how the GPS data was transmitted and decoded by the Arduino. Sample code and navigational calculations are included. Navigation Algorithm: When the pathfinder travel mode is to Autopilot, […]

Stress Test
Stress Test By: Nick Lukin (Design and Manufacturing Engineer) Introduction In order to ensure that the Pathfinder chassis could support the weight of the solar panels in order to properly interface it was necessary to perform a stress/displacement test in Solidworks. The solar panels overall weight was a maximum of 50lbs. The chassis was designed […]

Form Factor
From Factor By: Nick Lukin (Design and Manufacturing Engineer) Introduction In order to meet the requirement of the Pathfinder being dimensionally proportional to the actual Spirit and Opportunity rovers it was necessary to develop a measurement method in order to properly scale the overall design. Figure 1: Small Scale Model Analysis A small scale […]

Experiment: LiDAR Lite
By Jose Alcantar, Electronics and Controls Engineer Introduction The LIDAR is a laser range finder which can measure distances of up to 40 meters with an accuracy of ±2.5 cm. The device can be used via I2C interface or through pulse width modulation. The LIDAR is to be implemented onto the pathfinder for the use […]
Heading and GPS Coordinates Formatting
By Jose Alcantar, E&C Engineer Introduction: The GPS information received through the Arxterra control panel can be sent through three different data types. The first data type is a 32-bit floating point, the second is a 64-bit floating point or “double” and lastly a 32-bit integer or “long”. Depending on how the settings are configured […]

Implementing MOVE Command Firmware
By Jose Alcantar, Electronics and Controls Engineer Introduction: The pathfinder is controlled using the direction pad on both the control panel and through RC mode on the Arxterra app. When using the D-pad, the MOVE command is called from the 3Dotlibrary which is used to control the movement of the motors. Through the design of […]