Spiderbot

Level 1 Requirements – Final Iteration
By Kristine Abatay – Project Manager and Matthew Clegg – Computer & Control Systems The final statement of our mission objective created a new level 1 requirement regarding wireless control of Spiderbot through the Arxterra control panel and Arxterra Android app. The following is the final list of the level 1 requirements for Spiderbot, along […]
Final 3D Model
By: Simon Abatay – 3D Modeling and Manufacturing The final model is here! The following image is the final design that will be manufactured for Spiderbot that was created using SolidWorks: This final design was done in response to our project requirement that all components of Spiderbot’s body be three-dimensional. The chassis is composed of […]

Current Test of the Power HD High Torque Servo 1501 MG
Experiment Conducted by: Matthew Clegg (Controls – Spiderbot), Elaine Doan (Systems Engineering Division), and Kristine Abatay(Project Manager – Spiderbot) Test Setup written by: Matthew Clegg and Kristine Abatay Discussion and Results written by: Elaine Doan A test will be performed in attempt to find the current the Power HD High Torque Servo 1501 MG consumes […]
Design – First Iteration
By Simon Abatay, 3D Modeling and Manufacturing After a review with the Robot Company’s President, the initial tibia design was deemed unsatisfactory due to its flat nature. In order to tackle this, I decided to modify my original design to give it a more 3-dimensional appearance. My intentions with this modification step were to maintain […]

Mission Objective Modified
By Kristine Abatay, Project Manager Following the group’s preliminary design review presentation, we met with the Robot Company’s President and modified our mission objective. Our new mission objective is: Complete a hexapod robot project whose creation will achieve a speed that matches the current Robot Company rover project, operate safely, be capable of maneuvering a […]
Speed Calculations & Component Modification
By Matthew Clegg, Computer and Control Systems In order to tackle the initial calculated speed requirement of the rover project, we would need a starting point for Spiderbot. For this reason, I decided to make a calculation to determine the speed that the servo motors on Spiderbot’s legs would need to move in order for […]
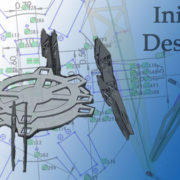
Spiderbot: Initial Design
By Simon Abatay, 3D Modeling and Manufacturing Picking up from last semester’s Spiderbot project, the design for this project will have 6 legs. Though the name ‘spider’ implies 8 legs, translating it to a project would become very pricy in the long run since it would require more materials and power to construct. Despite the […]
Spiderbot: Chop Suey Returns
By Matthew Clegg, Computer & Control Systems Chop Suey has returned! David Gonsalez, a member of the Hexapod team from the previous semester, has loaned us the hexapod prototype he built. Having access to an already built prototype will save time and money because we will not have to devote resources to make one. It […]
Spiderbot – Life & Times (Vol. 2)
By Kristine Abatay, Project Manager main() { printf(“hello, world!”); } It is a new semester at Robot Company and with it, a new Spiderbot! Our mission: construct a six-legged robot that will match the speed of the Robot Company’s rover project, operate safely, and have the capability of maneuvering a route in a natural setting. […]